正在加载图片...
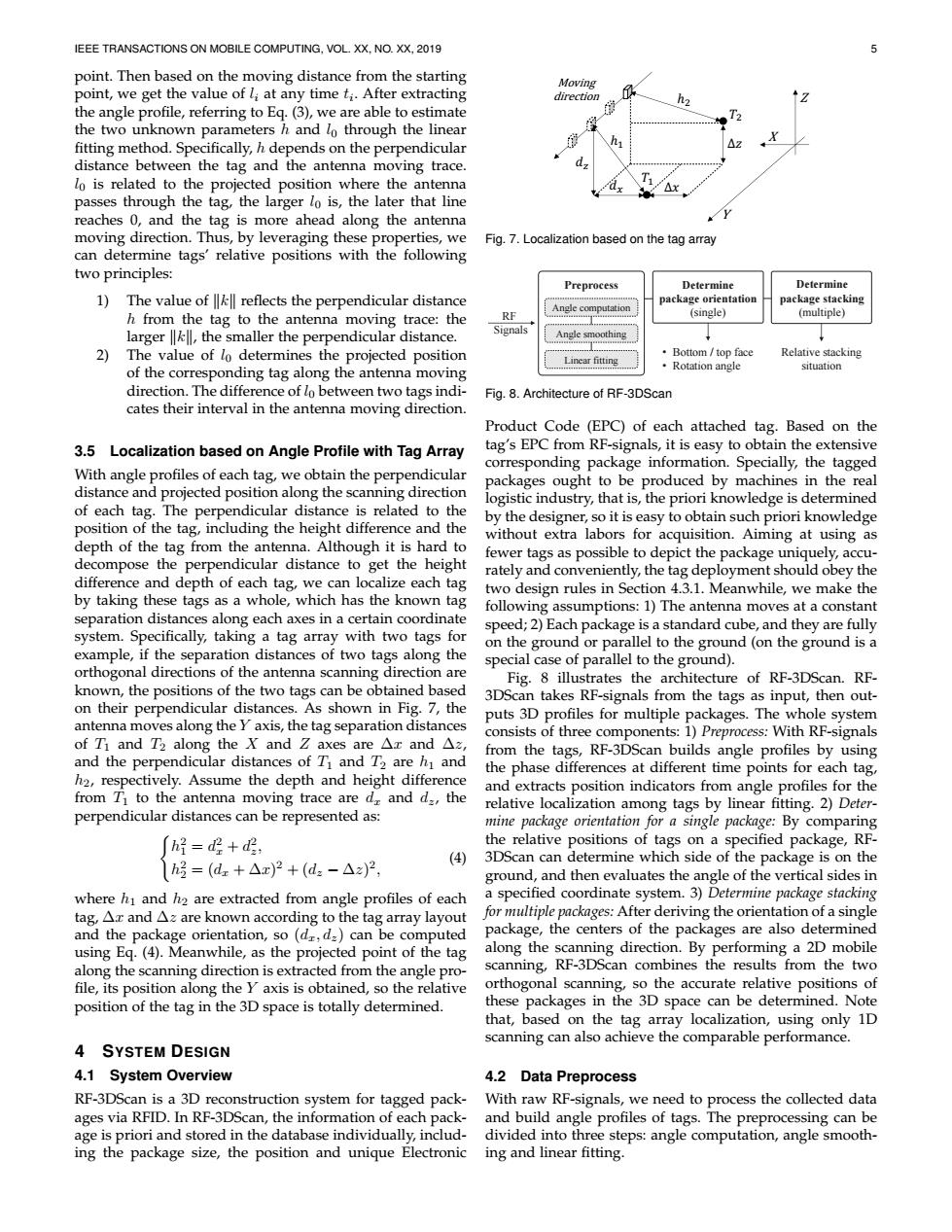
EEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2019 point.Then based on the moving distance from the starting Moving point,we get the value of li at any time ti.After extracting direction h2 the angle profile,referring to Eq.(3),we are able to estimate T2 the two unknown parameters h and lo through the linear fitting method.Specifically,h depends on the perpendicular h distance between the tag and the antenna moving trace. lo is related to the projected position where the antenna passes through the tag,the larger lo is,the later that line reaches 0,and the tag is more ahead along the antenna moving direction.Thus,by leveraging these properties,we Fig.7. Localization based on the tag array can determine tags'relative positions with the following two principles: Preprocess Determine Determine 1) The value of reflects the perpendicular distance package orientation package stacking Angle computation h from the tag to the antenna moving trace:the RF (single) (multiple) larger,the smaller the perpendicular distance. Signals Angle smoothing 2) The value of lo determines the projected position ·Bottom/top face Linear fitting Relative stacking of the corresponding tag along the antenna moving ·Rotation angle situation direction.The difference of lo between two tags indi- Fig.8.Architecture of RF-3DScan cates their interval in the antenna moving direction. Product Code (EPC)of each attached tag.Based on the 3.5 Localization based on Angle Profile with Tag Array tag's EPC from RF-signals,it is easy to obtain the extensive corresponding package information.Specially,the tagged With angle profiles of each tag,we obtain the perpendicular packages ought to be produced by machines in the real distance and projected position along the scanning direction logistic industry,that is,the priori knowledge is determined of each tag.The perpendicular distance is related to the position of the tag,including the height difference and the by the designer,so it is easy to obtain such priori knowledge without extra labors for acquisition.Aiming at using as depth of the tag from the antenna.Although it is hard to fewer tags as possible to depict the package uniquely,accu- decompose the perpendicular distance to get the height rately and conveniently,the tag deployment should obey the difference and depth of each tag,we can localize each tag two design rules in Section 4.3.1.Meanwhile,we make the by taking these tags as a whole,which has the known tag following assumptions:1)The antenna moves at a constant separation distances along each axes in a certain coordinate speed;2)Each package is a standard cube,and they are fully system.Specifically,taking a tag array with two tags for on the ground or parallel to the ground (on the ground is a example,if the separation distances of two tags along the special case of parallel to the ground). orthogonal directions of the antenna scanning direction are Fig.8 illustrates the architecture of RF-3DScan.RF- known,the positions of the two tags can be obtained based 3DScan takes RF-signals from the tags as input,then out- on their perpendicular distances.As shown in Fig.7,the puts 3D profiles for multiple packages.The whole system antenna moves along the Y axis,the tag separation distances consists of three components:1)Preprocess:With RF-signals of Ti and T2 along the X and Z axes are△rand△z, from the tags,RF-3DScan builds angle profiles by using and the perpendicular distances of Ti and T2 are hi and the phase differences at different time points for each tag, h2,respectively.Assume the depth and height difference and extracts position indicators from angle profiles for the from Ti to the antenna moving trace are d and d:,the relative localization among tags by linear fitting.2)Deter- perpendicular distances can be represented as: mine package orientation for a single package:By comparing h好=d+d, the relative positions of tags on a specified package,RF- (4) 3DScan can determine which side of the package is on the h=(d+△x)2+(d2-△z)2, ground,and then evaluates the angle of the vertical sides in where hi and h2 are extracted from angle profiles of each a specified coordinate system.3)Determine package stacking tag,Ax and Az are known according to the tag array layout for multiple packages:After deriving the orientation of a single and the package orientation,so (dr,d=)can be computed package,the centers of the packages are also determined using Eq.(4).Meanwhile,as the projected point of the tag along the scanning direction.By performing a 2D mobile along the scanning direction is extracted from the angle pro- scanning,RF-3DScan combines the results from the two file,its position along the Y axis is obtained,so the relative orthogonal scanning,so the accurate relative positions of position of the tag in the 3D space is totally determined. these packages in the 3D space can be determined.Note that,based on the tag array localization,using only 1D scanning can also achieve the comparable performance. SYSTEM DESIGN 4.1 System Overview 4.2 Data Preprocess RF-3DScan is a 3D reconstruction system for tagged pack-With raw RF-signals,we need to process the collected data ages via RFID.In RF-3DScan,the information of each pack- and build angle profiles of tags.The preprocessing can be age is priori and stored in the database individually,includ-divided into three steps:angle computation,angle smooth- ing the package size,the position and unique Electronic ing and linear fitting.IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2019 5 point. Then based on the moving distance from the starting point, we get the value of li at any time ti . After extracting the angle profile, referring to Eq. (3), we are able to estimate the two unknown parameters h and l0 through the linear fitting method. Specifically, h depends on the perpendicular distance between the tag and the antenna moving trace. l0 is related to the projected position where the antenna passes through the tag, the larger l0 is, the later that line reaches 0, and the tag is more ahead along the antenna moving direction. Thus, by leveraging these properties, we can determine tags’ relative positions with the following two principles: 1) The value of kkk reflects the perpendicular distance h from the tag to the antenna moving trace: the larger kkk, the smaller the perpendicular distance. 2) The value of l0 determines the projected position of the corresponding tag along the antenna moving direction. The difference of l0 between two tags indicates their interval in the antenna moving direction. 3.5 Localization based on Angle Profile with Tag Array With angle profiles of each tag, we obtain the perpendicular distance and projected position along the scanning direction of each tag. The perpendicular distance is related to the position of the tag, including the height difference and the depth of the tag from the antenna. Although it is hard to decompose the perpendicular distance to get the height difference and depth of each tag, we can localize each tag by taking these tags as a whole, which has the known tag separation distances along each axes in a certain coordinate system. Specifically, taking a tag array with two tags for example, if the separation distances of two tags along the orthogonal directions of the antenna scanning direction are known, the positions of the two tags can be obtained based on their perpendicular distances. As shown in Fig. 7, the antenna moves along the Y axis, the tag separation distances of T1 and T2 along the X and Z axes are ∆x and ∆z, and the perpendicular distances of T1 and T2 are h1 and h2, respectively. Assume the depth and height difference from T1 to the antenna moving trace are dx and dz, the perpendicular distances can be represented as: ( h 2 1 = d 2 x + d 2 z , h 2 2 = (dx + ∆x) 2 + (dz − ∆z) 2 , (4) where h1 and h2 are extracted from angle profiles of each tag, ∆x and ∆z are known according to the tag array layout and the package orientation, so (dx, dz) can be computed using Eq. (4). Meanwhile, as the projected point of the tag along the scanning direction is extracted from the angle pro- file, its position along the Y axis is obtained, so the relative position of the tag in the 3D space is totally determined. 4 SYSTEM DESIGN 4.1 System Overview RF-3DScan is a 3D reconstruction system for tagged packages via RFID. In RF-3DScan, the information of each package is priori and stored in the database individually, including the package size, the position and unique Electronic Moving direction Y X Z 01 02 ℎ2 ∆4 ℎ1 67 68 ∆9 Fig. 7. Localization based on the tag array ݄ ݈ Preprocess Angle computation Linear fitting Angle smoothing RF Signals Determine package orientation (single) Determine package stacking (multiple) • Bottom / top face • Rotation angle Relative stacking situation Fig. 8. Architecture of RF-3DScan Product Code (EPC) of each attached tag. Based on the tag’s EPC from RF-signals, it is easy to obtain the extensive corresponding package information. Specially, the tagged packages ought to be produced by machines in the real logistic industry, that is, the priori knowledge is determined by the designer, so it is easy to obtain such priori knowledge without extra labors for acquisition. Aiming at using as fewer tags as possible to depict the package uniquely, accurately and conveniently, the tag deployment should obey the two design rules in Section 4.3.1. Meanwhile, we make the following assumptions: 1) The antenna moves at a constant speed; 2) Each package is a standard cube, and they are fully on the ground or parallel to the ground (on the ground is a special case of parallel to the ground). Fig. 8 illustrates the architecture of RF-3DScan. RF- 3DScan takes RF-signals from the tags as input, then outputs 3D profiles for multiple packages. The whole system consists of three components: 1) Preprocess: With RF-signals from the tags, RF-3DScan builds angle profiles by using the phase differences at different time points for each tag, and extracts position indicators from angle profiles for the relative localization among tags by linear fitting. 2) Determine package orientation for a single package: By comparing the relative positions of tags on a specified package, RF- 3DScan can determine which side of the package is on the ground, and then evaluates the angle of the vertical sides in a specified coordinate system. 3) Determine package stacking for multiple packages: After deriving the orientation of a single package, the centers of the packages are also determined along the scanning direction. By performing a 2D mobile scanning, RF-3DScan combines the results from the two orthogonal scanning, so the accurate relative positions of these packages in the 3D space can be determined. Note that, based on the tag array localization, using only 1D scanning can also achieve the comparable performance. 4.2 Data Preprocess With raw RF-signals, we need to process the collected data and build angle profiles of tags. The preprocessing can be divided into three steps: angle computation, angle smoothing and linear fitting