正在加载图片...
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2019 Perpendicular cota distance T2 Equal angle point T 0 T Perpendkcular point Ty Moving a Moving distance OEqual angle Perpendicular A distance Fig.6.Model of the angle profile point point Fig.5.Metrics of the angle profile 3.4 Model of Angle Profile To depict the angle-profile-based measurement metrics in 3.2.2 Angle in Mobile Scanning mathematics,we build a linear model to derive the metrics As for multiple antennas,the phase offsets related to their from the angle profile automatically.Considering Fig.4,the own hardware characteristics are different,so it is hard to angle-of-arrival can be expressed as: determine 0n.Hence,we prefer a mobile antenna to multiple static antennas,in which case can be canceled. cot a= V-A (2) h For a mobile antenna,the angle-of-arrival is a little different.Without the loss of generality,we redefine the AoA where cot means the cotangent function,h is the perpen- in a mobile case,as shown in Fig.4.Similarly,T is the tag dicular distance between the tag and the antenna moving position and V is its projected point on the antenna moving trace.yA and yv represent the coordinates of point A and line,its perpendicular distance is h.Let the mobile antenna V along the antenna moving direction.Assume there is an be at position A,then the included angle of line TA and the antenna starting point S,the distance from S to V is lo,the antenna moving direction is just the angle-of-arrival (a)for antenna moved distance is l.Thus,(lo-l)represents the the tag when the antenna is at position A. distance from the antenna to the perpendicular point(same To estimate the angle at position A,we only need the as (yv -yA)),the angle can be rewritten as: phases collected at the two nearby positions(P and P2), 1 centered on the antenna(P1A AP2).Thus,the phase cota=L+b,k=-6s场 h (3) difference at position P and P2 can be used to estimate where the slope k is related to the minus reciprocal of h,the a with Eq.(1).By combining the angles at different antenna intercept b depends on the ratio of lo and h. positions,we can derive an angle profile for a specified tag. Taking the tags in Fig.5,the transformed angle expres- sion based on Eg.(3)should look like the lines shown 3.3 Metrics of Angle Profile in Fig.6.As l increases continuously during the moving process,a increases as well.When the antenna reaches the Suppose there are two tags and one antenna in the same perpendicular point,a is equal to /2,so cot a=0.The line plane (Fig.5).The antenna moves linearly from O to A, of T reaches 0 earlier than T2.Thus,the order of such zero so it passes through Ti first,followed by T2.When the points are corresponding to the tags'perpendicular points, antenna passes through the tag(corresponding to point V and the spacing between two zero points just reflects the in Fig.4),the angle-of-arrival (a)of that tag reaches /2, separation of tags'perpendicular points.In addition,the naming this point as the perpendicular point.Similarly,we call intersection of the two lines represents the position where the distance from the tag to the perpendicular point perpen- the tags are projected on the same line with the antenna, dicular distance,the direction perpendicular to the antenna corresponding to the equal angle point.Specifically,the moving direction as perpendicular direction.As T is on the smaller h is,the larger is,and the sharper the line is. left along the antenna moving direction,its perpendicular As the h of Ti is smaller than T2,the of Ti is larger,so point shows earlier than T2.Hence,the perpendicular point the line of n decreases faster than T2. is the key metric for the tags'relative positions along the For a certain tag,its angle profile records its angles moving direction. at different positions,as {(cot ai,li)},i=1,2,...,n,n Besides the perpendicular point,there is the other special represents the amount of samples.As described in Section point:equal angle point.The equal angle point is where the 3.2.2,it is easy to obtain cot a;at a specific position with the antenna and the two tags are in the same line,so Ti and separation distance and the phase difference of two nearby T2 share the same angle.Before equal point,the angle of positions,here comes a new question,how to determine T1 is smaller than the angle of T2.On the contrary,the the location of the antenna during the moving process? angle of Ti changes to be bigger than that of T2 after the Actually,we only care about the relative position of the equal angle point.No matter for Ti or T2,its angle increases antenna along the linear scanning direction when it collects continuously during the antenna moving process,so it is data,we need not the absolute position of the antenna in obvious that the angle of Ti changes faster than that of the 3D space,but we require to know the relative moving T2.Such phenomenon is due to the smaller perpendicular distance along the scanning direction so as to determine the distance of T1.Thus,according to the angle change rate, value of li in the angle profile.Note that,it is the relative we can determine the tags'relative positions along the positions among tags that matters,so we can randomly set perpendicular direction. a position along the linear scanning direction as the startingIEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2019 4
ܶଵ ߙ ߙ ߙ ᇱ ᇱᇱ ଵߙ ଶߙ ଵߙ Ԣ ଶߙ Ԣ
݄ଶ
݄ଵ ܶଶ ܶଵ ܣ ܱ ܶଶ ܶଵ ߙ
Ͳ
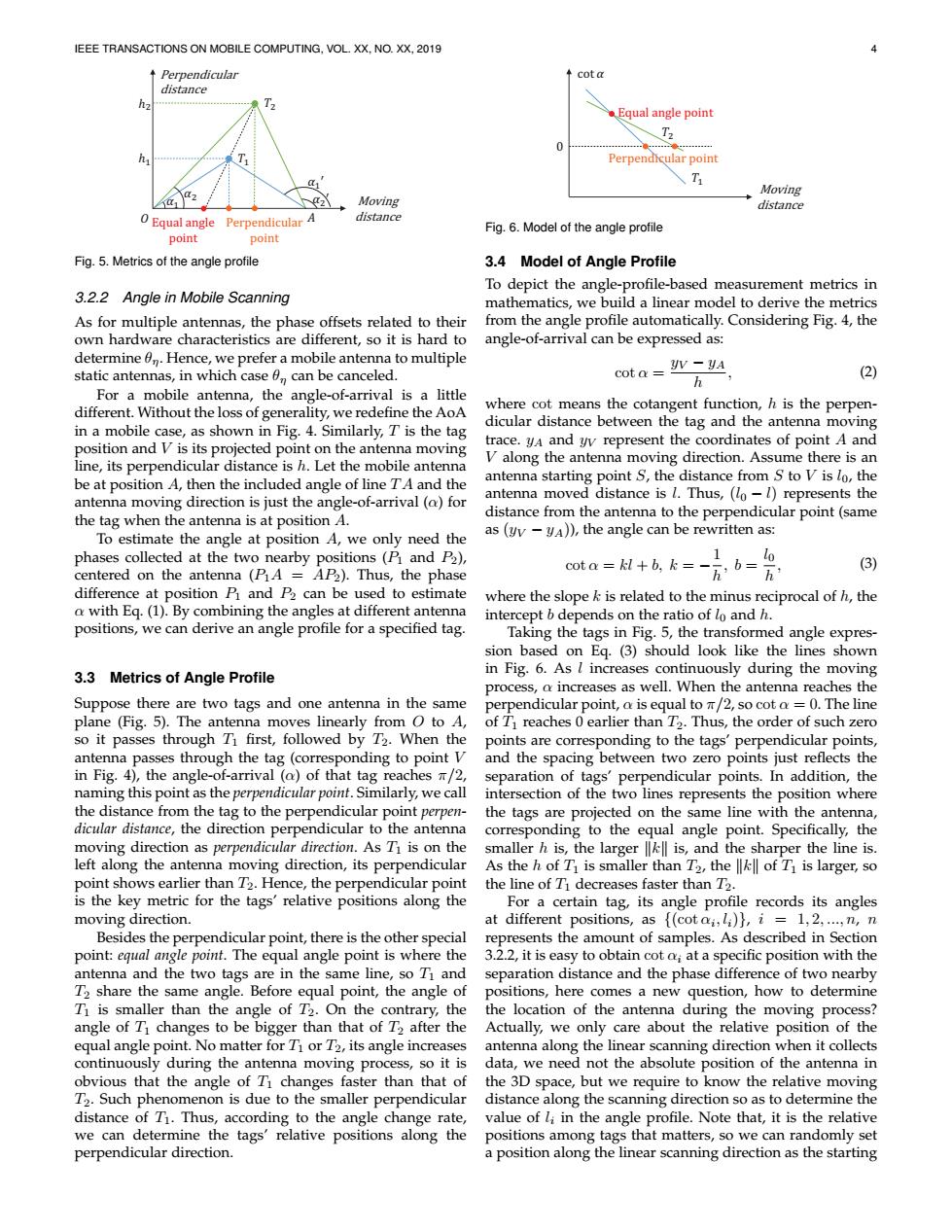
Fig. 5. Metrics of the angle profile 3.2.2 Angle in Mobile Scanning As for multiple antennas, the phase offsets related to their own hardware characteristics are different, so it is hard to determine θη. Hence, we prefer a mobile antenna to multiple static antennas, in which case θη can be canceled. For a mobile antenna, the angle-of-arrival is a little different. Without the loss of generality, we redefine the AoA in a mobile case, as shown in Fig. 4. Similarly, T is the tag position and V is its projected point on the antenna moving line, its perpendicular distance is h. Let the mobile antenna be at position A, then the included angle of line T A and the antenna moving direction is just the angle-of-arrival (α) for the tag when the antenna is at position A. To estimate the angle at position A, we only need the phases collected at the two nearby positions (P1 and P2), centered on the antenna (P1A = AP2). Thus, the phase difference at position P1 and P2 can be used to estimate α with Eq. (1). By combining the angles at different antenna positions, we can derive an angle profile for a specified tag. 3.3 Metrics of Angle Profile Suppose there are two tags and one antenna in the same plane (Fig. 5). The antenna moves linearly from O to A, so it passes through T1 first, followed by T2. When the antenna passes through the tag (corresponding to point V in Fig. 4), the angle-of-arrival (α) of that tag reaches π/2, naming this point as the perpendicular point. Similarly, we call the distance from the tag to the perpendicular point perpendicular distance, the direction perpendicular to the antenna moving direction as perpendicular direction. As T1 is on the left along the antenna moving direction, its perpendicular point shows earlier than T2. Hence, the perpendicular point is the key metric for the tags’ relative positions along the moving direction. Besides the perpendicular point, there is the other special point: equal angle point. The equal angle point is where the antenna and the two tags are in the same line, so T1 and T2 share the same angle. Before equal point, the angle of T1 is smaller than the angle of T2. On the contrary, the angle of T1 changes to be bigger than that of T2 after the equal angle point. No matter for T1 or T2, its angle increases continuously during the antenna moving process, so it is obvious that the angle of T1 changes faster than that of T2. Such phenomenon is due to the smaller perpendicular distance of T1. Thus, according to the angle change rate, we can determine the tags’ relative positions along the perpendicular direction.
ܶଵ ߙ ߙ ߙ ᇱ ᇱᇱ ଵߙ ଶߙ ଵߙ Ԣ ଶߙ Ԣ
݄ଶ
݄ଵ ܶଶ ܶଵ ܣ ܱ ܶଶ ܶଵ ߙ
Ͳ
Fig. 6. Model of the angle profile 3.4 Model of Angle Profile To depict the angle-profile-based measurement metrics in mathematics, we build a linear model to derive the metrics from the angle profile automatically. Considering Fig. 4, the angle-of-arrival can be expressed as: cot α = yV − yA h , (2) where cot means the cotangent function, h is the perpendicular distance between the tag and the antenna moving trace. yA and yV represent the coordinates of point A and V along the antenna moving direction. Assume there is an antenna starting point S, the distance from S to V is l0, the antenna moved distance is l. Thus, (l0 − l) represents the distance from the antenna to the perpendicular point (same as (yV − yA)), the angle can be rewritten as: cot α = kl + b, k = − 1 h , b = l0 h , (3) where the slope k is related to the minus reciprocal of h, the intercept b depends on the ratio of l0 and h. Taking the tags in Fig. 5, the transformed angle expression based on Eq. (3) should look like the lines shown in Fig. 6. As l increases continuously during the moving process, α increases as well. When the antenna reaches the perpendicular point, α is equal to π/2, so cot α = 0. The line of T1 reaches 0 earlier than T2. Thus, the order of such zero points are corresponding to the tags’ perpendicular points, and the spacing between two zero points just reflects the separation of tags’ perpendicular points. In addition, the intersection of the two lines represents the position where the tags are projected on the same line with the antenna, corresponding to the equal angle point. Specifically, the smaller h is, the larger kkk is, and the sharper the line is. As the h of T1 is smaller than T2, the kkk of T1 is larger, so the line of T1 decreases faster than T2. For a certain tag, its angle profile records its angles at different positions, as {(cot αi , li)}, i = 1, 2, ..., n, n represents the amount of samples. As described in Section 3.2.2, it is easy to obtain cot αi at a specific position with the separation distance and the phase difference of two nearby positions, here comes a new question, how to determine the location of the antenna during the moving process? Actually, we only care about the relative position of the antenna along the linear scanning direction when it collects data, we need not the absolute position of the antenna in the 3D space, but we require to know the relative moving distance along the scanning direction so as to determine the value of li in the angle profile. Note that, it is the relative positions among tags that matters, so we can randomly set a position along the linear scanning direction as the starting��������������������������������������������������������������������