正在加载图片...
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2019 each tag's 3D coordinates,the absolute localization can be 45 tailored to our problem for 3D reconstruction.However,this approach suffers from the complicated system deployment or the high computational complexity.For example,the state-of-the-art absolute localization schemes Tagoram [13] and RFind [15]are able to achieve the cm-level localization accuracy,however,they require either high computation overhead or dedicated device calibration,which are unfit 60120180240300360 Rotation (deg.) for estimating many packages concurrently.In addition,the localization work focuses on pinpointing only a single tag, (a)Rotate along the Z axis (b)Phase change during rotation how to estimate the package placement with the tag array Fig.2.Measured phase of a single tag rotating along the Z axis is still under-investigated.Rather than the absolute localiza- tion of a single tag,our approach utilizes the tag array to provide the localization result,which can achieve the com- parable performance without the above limits.Moreover, the relative localization investigates the relative locations of objects as opposed to absolute coordinates.STPP [19]is the first work to tackle the 2D relative localization.It investi- △d≈ △ds gates the spatial-temporal dynamics with phase profiles.A d x cosa d x cosa Moving V-zone (comprised of phase sequences)based solution is direction proposed to determine the relative localization of tagged A1 d P2 objects in the 2D plane.However,STPP cannot always get Fig.3.Angle-of-Arrival in static Fig.4.Angle-of-Arrival in mobile a V-zone in practice,especially when the sampling rate of scanning scanning per tag is low (due to many tags)or there are some dead zones of the RFID communication.Unlike STPP,regardless Fig.2 plots the phase change when a tag rotates along the of the V-zone,our work takes full advantages of all phase Z axis.It shows that the phase varies continuously over the measurements for localization and 3D reconstruction. rotation.Next,we discuss how to use the angle-of-arrival approach to overcome above three challenges,and benefit ANGLE-PROFILE-BASED MODELING our system design in the sequel. In this section,we first discuss the limitations of directly using phase values,and introduce how to use the phase dif- 3.2 Angle Profile ference to model the angle profile for the 3D reconstruction. Angle-of-Arrival (AoA)is one of the most popular RF-based localization measurements using phase difference.The basic idea of our approach is that by moving the antenna to scan 3.1 Limitations of Phase-based Measurement the tags,we extract phase differences from the specified tags The RF phase is a widely used attribute of the wireless at different time points,then we derive the geometry angles signal that reflects the phase offset between the received between the tag and the mobile antenna when the antenna electromagnetic wave and the emitted one,ranging from is at different positions,which is called angle profile. 0 to 2m.Due to the ultra-high working frequency in RFIDs and fine-grained measurement resolution of phase values by 3.2.1 Angle in Static Scanning COTS readers,the phase is very sensitive to the distance be- As shown in Fig.3,a tag is set at T,A and A2 are two tween the antenna and the tag,which gives us the potential antennas separated by d,M is the middle point of A1A2.V chance to achieve the accurate 3D reconstruction.Suppose is the projected point of T on the antenna pair line A1A2, s is the distance between the antenna and the tag.Since the the perpendicular distance is h.The included angle between backscatter communication of RFID is round-trip,the signal line TM and line MV is the AoA for tag T at position M, totally traverses a distance of 2s in each communication. denoted as a.Let dr.A and dr.A2 represent the distances Besides the distance,some hardware characteristics will also between T and the antennas,the antennas collect the phases distort the phase value.Hence,the phase6 reported by the as 0A:and 0A2,respectively.0A1,0A2 E [0,2). reader can be expressed as: The phase difference is related to the distance difference 2π from the tag to the antennas.When h>d,the relationship ×2s+7 mod2π between the phase difference (A0=0A:-0A2+n,0n means the phase offset caused by the hardware characteristics of A where A is the wavelength,n represents the phase offset and A2)and the distance difference (Ad dr.A:-dr.A2 caused by the hardware characteristics. dcosa)can be approximated as: Although the phase accurately reflects the distance,we face three challenges before putting it into use:1)The distort 2dcosaA0 (1) 入 2π +n, factor n caused by the physical hardware is unknown;2)The phase value repeats periodically,it is not feasible to use it wherencan be any integer in【-头-尝,装-L,its directly;3)In addition to s and n,our extensive experiments range isd.Whend<,the value range ofn is smaller than show that the tag orientation influences the phase value 6. 1,which means n has a unique value,so a is deterministicIEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2019 3 each tag’s 3D coordinates, the absolute localization can be tailored to our problem for 3D reconstruction. However, this approach suffers from the complicated system deployment or the high computational complexity. For example, the state-of-the-art absolute localization schemes Tagoram [13] and RFind [15] are able to achieve the cm-level localization accuracy, however, they require either high computation overhead or dedicated device calibration, which are unfit for estimating many packages concurrently. In addition, the localization work focuses on pinpointing only a single tag, how to estimate the package placement with the tag array is still under-investigated. Rather than the absolute localization of a single tag, our approach utilizes the tag array to provide the localization result, which can achieve the comparable performance without the above limits. Moreover, the relative localization investigates the relative locations of objects as opposed to absolute coordinates. STPP [19] is the first work to tackle the 2D relative localization. It investigates the spatial-temporal dynamics with phase profiles. A V-zone (comprised of phase sequences) based solution is proposed to determine the relative localization of tagged objects in the 2D plane. However, STPP cannot always get a V-zone in practice, especially when the sampling rate of per tag is low (due to many tags) or there are some dead zones of the RFID communication. Unlike STPP, regardless of the V-zone, our work takes full advantages of all phase measurements for localization and 3D reconstruction. 3 ANGLE-PROFILE-BASED MODELING In this section, we first discuss the limitations of directly using phase values, and introduce how to use the phase difference to model the angle profile for the 3D reconstruction. 3.1 Limitations of Phase-based Measurement The RF phase is a widely used attribute of the wireless signal that reflects the phase offset between the received electromagnetic wave and the emitted one, ranging from 0 to 2π. Due to the ultra-high working frequency in RFIDs and fine-grained measurement resolution of phase values by COTS readers, the phase is very sensitive to the distance between the antenna and the tag, which gives us the potential chance to achieve the accurate 3D reconstruction. Suppose s is the distance between the antenna and the tag. Since the backscatter communication of RFID is round-trip, the signal totally traverses a distance of 2s in each communication. Besides the distance, some hardware characteristics will also distort the phase value. Hence, the phase θ reported by the reader can be expressed as: θ = 2π λ × 2s + η mod 2π, where λ is the wavelength, η represents the phase offset caused by the hardware characteristics. Although the phase accurately reflects the distance, we face three challenges before putting it into use: 1) The distort factor η caused by the physical hardware is unknown; 2) The phase value repeats periodically, it is not feasible to use it directly; 3) In addition to s and η, our extensive experiments show that the tag orientation influences the phase value θ.
͵Ͳι Ͳι Ͳ ι ͻͲι
Ͳ ι ͵Ͳι Ͳι ͻͲι
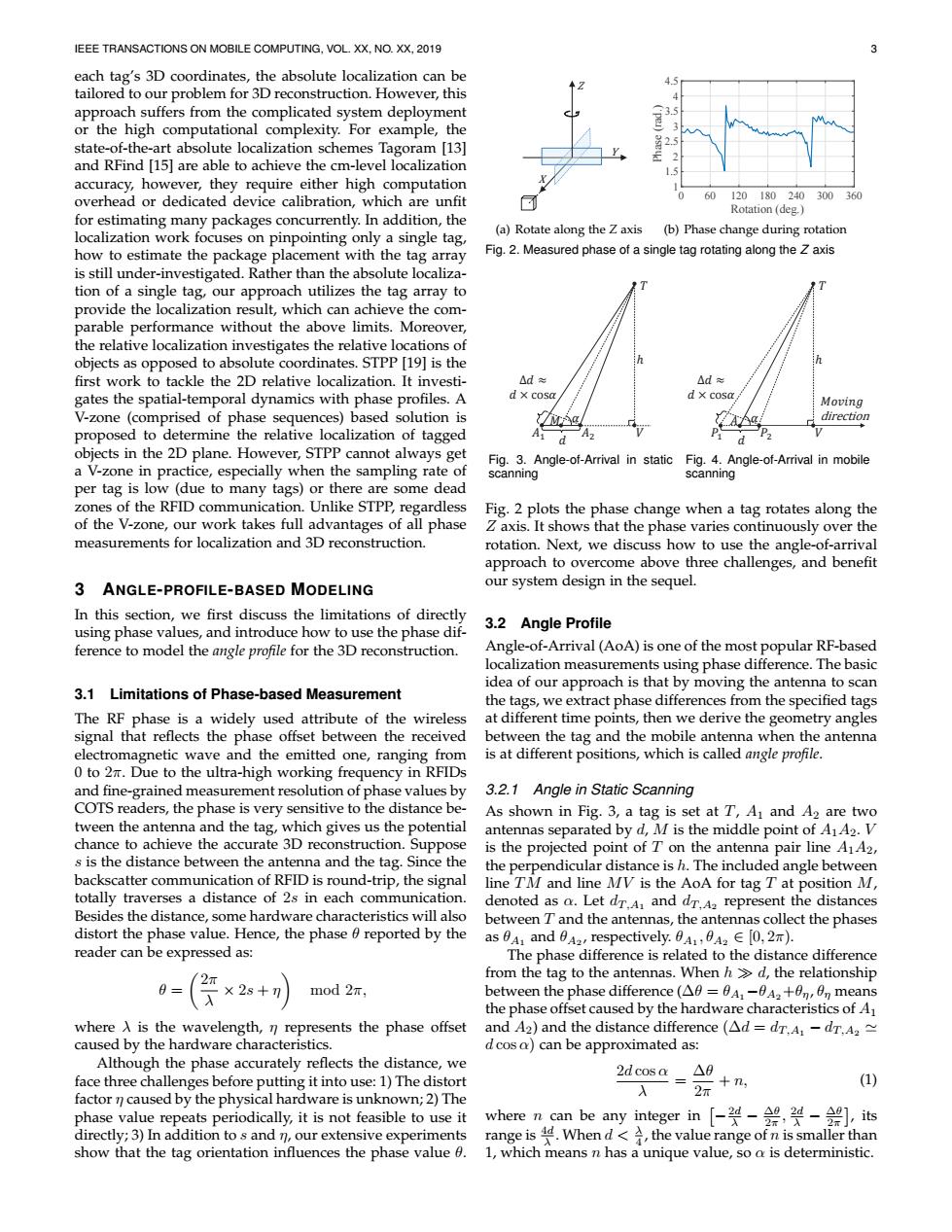
(a) Rotate along the Z axis 0 60 120 180 240 300 360 Rotation (deg.) 1 1.5 2 2.5 3 3.5 4 4.5 Phase (rad.) (b) Phase change during rotation Fig. 2. Measured phase of a single tag rotating along the Z axis 1 2 -. 3 . × cos2 )" )& 4 5 6 . Fig. 3. Angle-of-Arrival in static scanning ) 1 2 -. 3 . × cos2 " & 4 5 . 6789:; direction Fig. 4. Angle-of-Arrival in mobile scanning Fig. 2 plots the phase change when a tag rotates along the Z axis. It shows that the phase varies continuously over the rotation. Next, we discuss how to use the angle-of-arrival approach to overcome above three challenges, and benefit our system design in the sequel. 3.2 Angle Profile Angle-of-Arrival (AoA) is one of the most popular RF-based localization measurements using phase difference. The basic idea of our approach is that by moving the antenna to scan the tags, we extract phase differences from the specified tags at different time points, then we derive the geometry angles between the tag and the mobile antenna when the antenna is at different positions, which is called angle profile. 3.2.1 Angle in Static Scanning As shown in Fig. 3, a tag is set at T, A1 and A2 are two antennas separated by d, M is the middle point of A1A2. V is the projected point of T on the antenna pair line A1A2, the perpendicular distance is h. The included angle between line TM and line MV is the AoA for tag T at position M, denoted as α. Let dT ,A1 and dT ,A2 represent the distances between T and the antennas, the antennas collect the phases as θA1 and θA2 , respectively. θA1 , θA2 ∈ [0, 2π). The phase difference is related to the distance difference from the tag to the antennas. When h
d, the relationship between the phase difference (∆θ = θA1−θA2+θη, θη means the phase offset caused by the hardware characteristics of A1 and A2) and the distance difference (∆d = dT ,A1 − dT ,A2 ' d cos α) can be approximated as: 2d cos α λ = ∆θ 2π + n, (1) where n can be any integer in − 2d λ − ∆θ 2π , 2d λ − ∆θ 2π , its range is 4d λ . When d < λ 4 , the value range of n is smaller than 1, which means n has a unique value, so α is deterministic.��