正在加载图片...
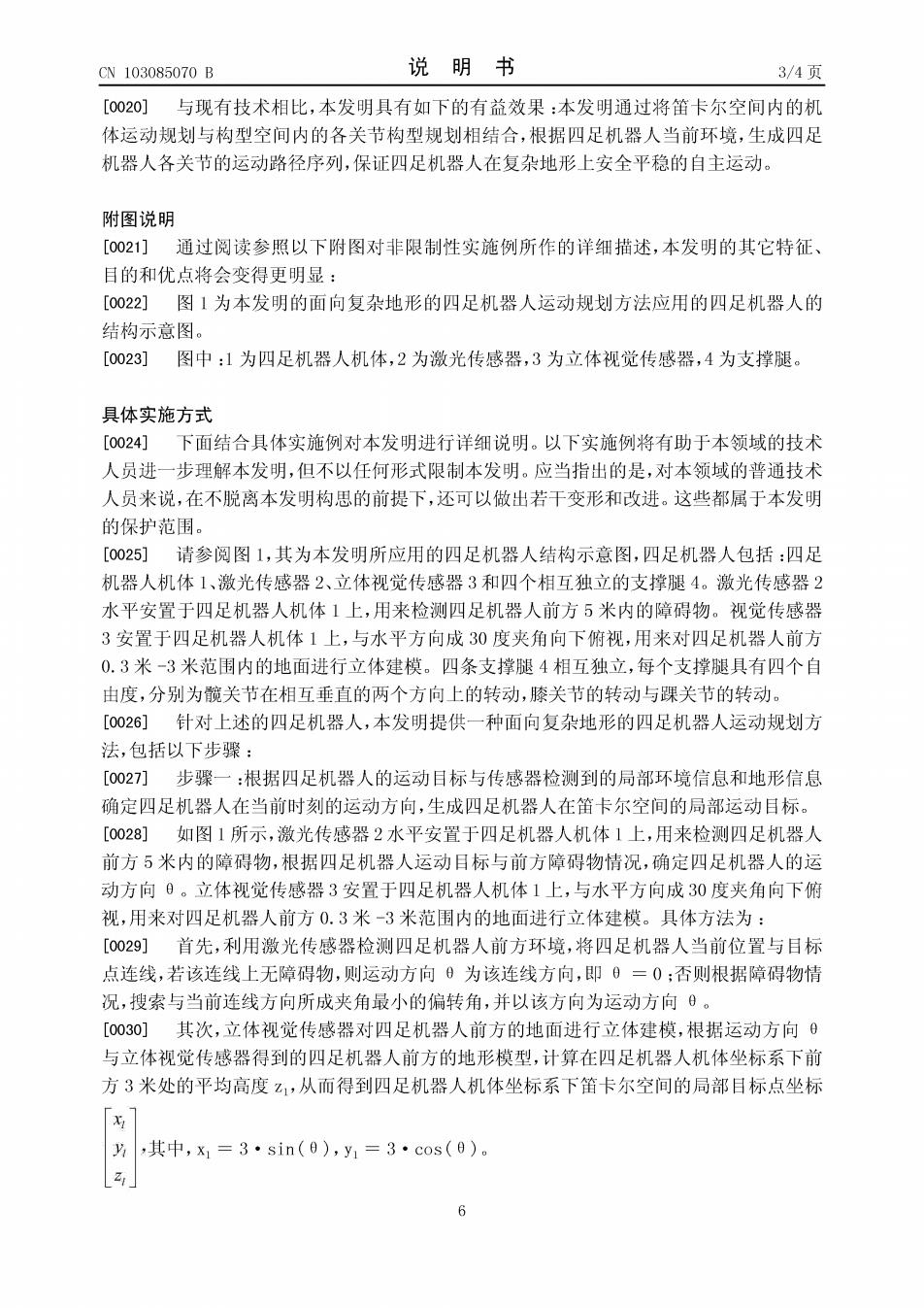
CN103085070B 说明书 3/4页 [0020] 与现有技术相比,本发明具有如下的有益效果:本发明通过将笛卡尔空间内的机 体运动规划与构型空间内的各关节构型规划相结合,根据四足机器人当前环境,生成四足 机器人各关节的运动路径序列,保证四足机器人在复杂地形上安全平稳的自主运动。 附图说明 [0021]通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显: [0022]图1为本发明的面向复杂地形的四足机器人运动规划方法应用的四足机器人的 结构示意图。 [0023] 图中:1为四足机器人机体,2为激光传感器,3为立体视觉传感器,4为支撑腿。 具体实施方式 [0024]下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术 人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术 人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明 的保护范围。 [0025]请参阅图1,其为本发明所应用的四足机器人结构示意图,四足机器人包括:四足 机器人机体1、激光传感器2、立体视觉传感器3和四个相互独立的支撑腿4。激光传感器2 水平安置于四足机器人机体1上,用来检测四足机器人前方5米内的障碍物。视觉传感器 3安置于四足机器人机体1上,与水平方向成30度夹角向下俯视,用来对四足机器人前方 0.3米-3米范围内的地面进行立体建模。四条支撑腿4相互独立,每个支撑腿具有四个自 由度,分别为髋关节在相互垂直的两个方向上的转动,膝关节的转动与踝关节的转动。 [0026]针对上述的四足机器人,本发明提供一种面向复杂地形的四足机器人运动规划方 法,包括以下步骤: [0027]步骤一:根据四足机器人的运动目标与传感器检测到的局部环境信息和地形信息 确定四足机器人在当前时刻的运动方向,生成四足机器人在笛卡尔空间的局部运动目标。 [0028]如图1所示,激光传感器2水平安置于四足机器人机体1上,用来检测四足机器人 前方5米内的障碍物,根据四足机器人运动目标与前方障碍物情况,确定四足机器人的运 动方向日。立体视觉传感器3安置于四足机器人机体1上,与水平方向成30度夹角向下俯 视,用来对四足机器人前方0.3米-3米范围内的地面进行立体建模。具体方法为: [0029]首先,利用激光传感器检测四足机器人前方环境,将四足机器人当前位置与目标 点连线,若该连线上无障碍物,则运动方向θ为该连线方向,即日=0:否则根据障碍物情 况,搜索与当前连线方向所成夹角最小的偏转角,并以该方向为运动方向日。 [0030] 其次,立体视觉传感器对四足机器人前方的地面进行立体建模,根据运动方向θ 与立体视觉传感器得到的四足机器人前方的地形模型,计算在四足机器人机体坐标系下前 方3米处的平均高度1,从而得到四足机器人机体坐标系下笛卡尔空间的局部目标点坐标 ,其中,x1=3·sin(0),y1=3·cos(θ)