正在加载图片...
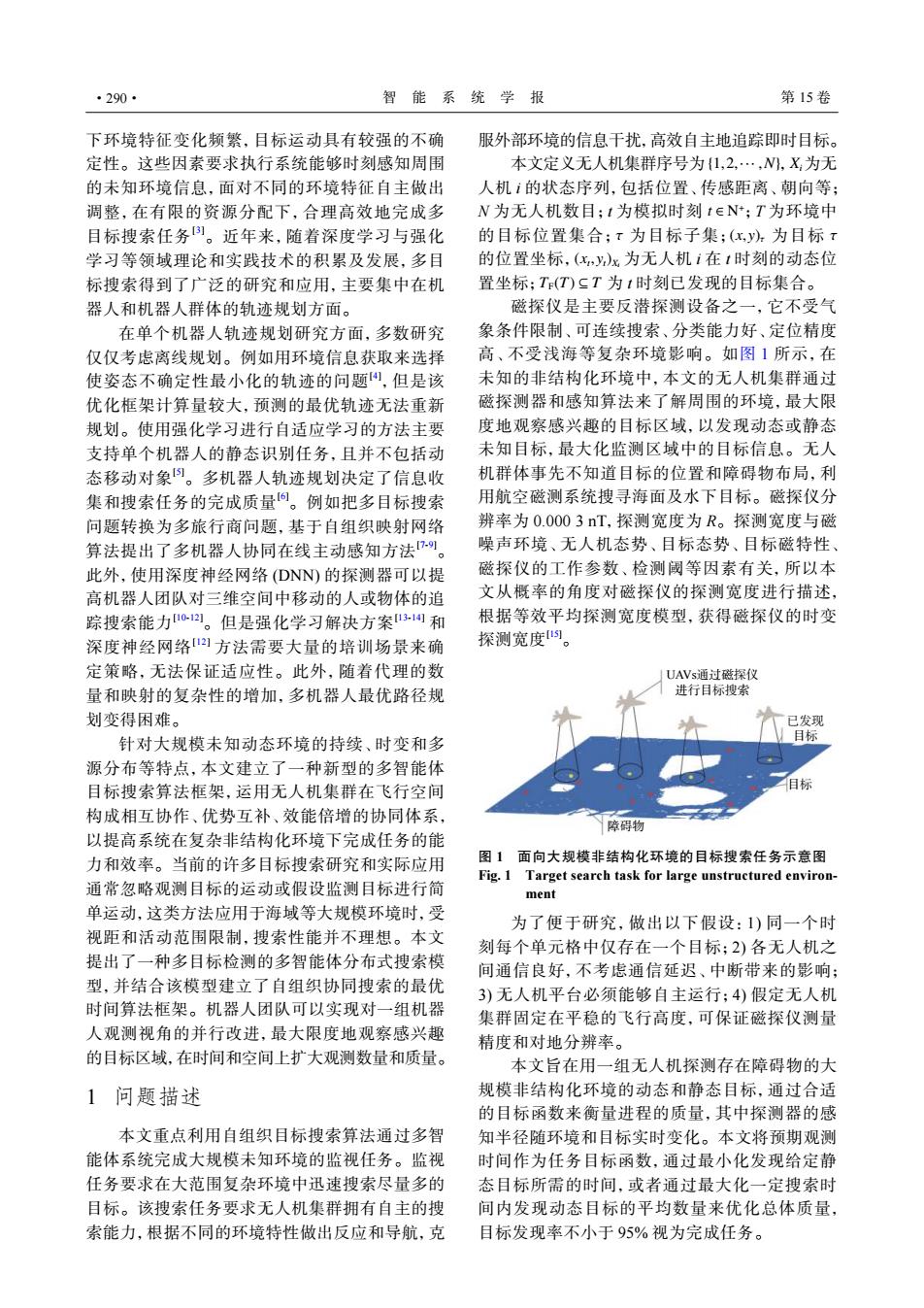
·290· 智能系统学 报 第15卷 下环境特征变化频繁,目标运动具有较强的不确 服外部环境的信息干扰,高效自主地追踪即时目标。 定性。这些因素要求执行系统能够时刻感知周围 本文定义无人机集群序号为{1,2,…,N,X为无 的未知环境信息,面对不同的环境特征自主做出 人机i的状态序列,包括位置、传感距离、朝向等; 调整,在有限的资源分配下,合理高效地完成多 N为无人机数目;1为模拟时刻t∈N;T为环境中 目标搜索任务们。近年来,随着深度学习与强化 的目标位置集合;π为目标子集;(xy),为目标τ 学习等领域理论和实践技术的积累及发展,多目 的位置坐标,(,y)x为无人机i在1时刻的动态位 标搜索得到了广泛的研究和应用,主要集中在机 置坐标:T(T)sT为t时刻已发现的目标集合。 器人和机器人群体的轨迹规划方面。 磁探仪是主要反潜探测设备之一,它不受气 在单个机器人轨迹规划研究方面,多数研究 象条件限制、可连续搜索、分类能力好、定位精度 仅仅考虑离线规划。例如用环境信息获取来选择 高、不受浅海等复杂环境影响。如图1所示,在 使姿态不确定性最小化的轨迹的问题,但是该 未知的非结构化环境中,本文的无人机集群通过 优化框架计算量较大,预测的最优轨迹无法重新 磁探测器和感知算法来了解周围的环境,最大限 规划。使用强化学习进行自适应学习的方法主要 度地观察感兴趣的目标区域,以发现动态或静态 支持单个机器人的静态识别任务,且并不包括动 未知目标,最大化监测区域中的目标信息。无人 态移动对象。多机器人轨迹规划决定了信息收 机群体事先不知道目标的位置和障碍物布局,利 集和搜索任务的完成质量。例如把多目标搜索 用航空磁测系统搜寻海面及水下目标。磁探仪分 问题转换为多旅行商问题,基于自组织映射网络 辨率为0.0003nT,探测宽度为R。探测宽度与磁 算法提出了多机器人协同在线主动感知方法。 噪声环境、无人机态势、目标态势、目标磁特性、 此外,使用深度神经网络(DNN)的探测器可以提 磁探仪的工作参数、检测阈等因素有关,所以本 高机器人团队对三维空间中移动的人或物体的追 文从概率的角度对磁探仪的探测宽度进行描述, 踪搜索能力。但是强化学习解决方案3和 根据等效平均探测宽度模型,获得磁探仪的时变 深度神经网络21方法需要大量的培训场景来确 探测宽度。 定策略,无法保证适应性。此外,随着代理的数 UAVs通过磁探仪 量和映射的复杂性的增加,多机器人最优路径规 进行目标搜索 划变得困难。 已发现 针对大规模未知动态环境的持续、时变和多 目标 源分布等特点,本文建立了一种新型的多智能体 目标搜索算法框架,运用无人机集群在飞行空间 目标 构成相互协作、优势互补、效能倍增的协同体系, 障碍物 以提高系统在复杂非结构化环境下完成任务的能 力和效率。当前的许多目标搜索研究和实际应用 图1面向大规模非结构化环境的目标搜索任务示意图 Fig.1 Target search task for large unstructured environ- 通常忽略观测目标的运动或假设监测目标进行简 ment 单运动,这类方法应用于海域等大规模环境时,受 为了便于研究,做出以下假设:1)同一个时 视距和活动范围限制,搜索性能并不理想。本文 刻每个单元格中仅存在一个目标:2)各无人机之 提出了一种多目标检测的多智能体分布式搜索模 间通信良好,不考虑通信延迟、中断带来的影响; 型,并结合该模型建立了自组织协同搜索的最优 3)无人机平台必须能够自主运行;4)假定无人机 时间算法框架。机器人团队可以实现对一组机器 集群固定在平稳的飞行高度,可保证磁探仪测量 人观测视角的并行改进,最大限度地观察感兴趣 精度和对地分辨率。 的目标区域,在时间和空间上扩大观测数量和质量。 本文旨在用一组无人机探测存在障碍物的大 1问题描述 规模非结构化环境的动态和静态目标,通过合适 的目标函数来衡量进程的质量,其中探测器的感 本文重点利用自组织目标搜索算法通过多智 知半径随环境和目标实时变化。本文将预期观测 能体系统完成大规模未知环境的监视任务。监视 时间作为任务目标函数,通过最小化发现给定静 任务要求在大范围复杂环境中迅速搜索尽量多的 态目标所需的时间,或者通过最大化一定搜索时 目标。该搜索任务要求无人机集群拥有自主的搜 间内发现动态目标的平均数量来优化总体质量, 索能力,根据不同的环境特性做出反应和导航,克 目标发现率不小于95%视为完成任务。下环境特征变化频繁,目标运动具有较强的不确 定性。这些因素要求执行系统能够时刻感知周围 的未知环境信息,面对不同的环境特征自主做出 调整,在有限的资源分配下,合理高效地完成多 目标搜索任务[3]。近年来,随着深度学习与强化 学习等领域理论和实践技术的积累及发展,多目 标搜索得到了广泛的研究和应用,主要集中在机 器人和机器人群体的轨迹规划方面。 在单个机器人轨迹规划研究方面,多数研究 仅仅考虑离线规划。例如用环境信息获取来选择 使姿态不确定性最小化的轨迹的问题[4] ,但是该 优化框架计算量较大,预测的最优轨迹无法重新 规划。使用强化学习进行自适应学习的方法主要 支持单个机器人的静态识别任务,且并不包括动 态移动对象[5]。多机器人轨迹规划决定了信息收 集和搜索任务的完成质量[6]。例如把多目标搜索 问题转换为多旅行商问题,基于自组织映射网络 算法提出了多机器人协同在线主动感知方法[7-9]。 此外,使用深度神经网络 (DNN) 的探测器可以提 高机器人团队对三维空间中移动的人或物体的追 踪搜索能力[10-12]。但是强化学习解决方案[13-14] 和 深度神经网络[12] 方法需要大量的培训场景来确 定策略,无法保证适应性。此外,随着代理的数 量和映射的复杂性的增加,多机器人最优路径规 划变得困难。 针对大规模未知动态环境的持续、时变和多 源分布等特点,本文建立了一种新型的多智能体 目标搜索算法框架,运用无人机集群在飞行空间 构成相互协作、优势互补、效能倍增的协同体系, 以提高系统在复杂非结构化环境下完成任务的能 力和效率。当前的许多目标搜索研究和实际应用 通常忽略观测目标的运动或假设监测目标进行简 单运动,这类方法应用于海域等大规模环境时,受 视距和活动范围限制,搜索性能并不理想。本文 提出了一种多目标检测的多智能体分布式搜索模 型,并结合该模型建立了自组织协同搜索的最优 时间算法框架。机器人团队可以实现对一组机器 人观测视角的并行改进,最大限度地观察感兴趣 的目标区域,在时间和空间上扩大观测数量和质量。 1 问题描述 本文重点利用自组织目标搜索算法通过多智 能体系统完成大规模未知环境的监视任务。监视 任务要求在大范围复杂环境中迅速搜索尽量多的 目标。该搜索任务要求无人机集群拥有自主的搜 索能力,根据不同的环境特性做出反应和导航,克 服外部环境的信息干扰,高效自主地追踪即时目标。 {1,2,··· ,N} Xi t ∈ N + τ (x, y)τ τ (xt , yt)Xi TF(T) ⊆ T 本文定义无人机集群序号为 , 为无 人机 i 的状态序列,包括位置、传感距离、朝向等; N 为无人机数目;t 为模拟时刻 ;T 为环境中 的目标位置集合; 为目标子集; 为目标 的位置坐标, 为无人机 i 在 t 时刻的动态位 置坐标; 为 t 时刻已发现的目标集合。 磁探仪是主要反潜探测设备之一,它不受气 象条件限制、可连续搜索、分类能力好、定位精度 高、不受浅海等复杂环境影响。如图 1 所示,在 未知的非结构化环境中,本文的无人机集群通过 磁探测器和感知算法来了解周围的环境,最大限 度地观察感兴趣的目标区域,以发现动态或静态 未知目标,最大化监测区域中的目标信息。无人 机群体事先不知道目标的位置和障碍物布局,利 用航空磁测系统搜寻海面及水下目标。磁探仪分 辨率为 0.000 3 nT,探测宽度为 R。探测宽度与磁 噪声环境、无人机态势、目标态势、目标磁特性、 磁探仪的工作参数、检测阈等因素有关,所以本 文从概率的角度对磁探仪的探测宽度进行描述, 根据等效平均探测宽度模型,获得磁探仪的时变 探测宽度[15]。 UAVs通过磁探仪 进行目标搜索 已发现 目标 目标 障碍物 图 1 面向大规模非结构化环境的目标搜索任务示意图 Fig. 1 Target search task for large unstructured environment 为了便于研究,做出以下假设:1) 同一个时 刻每个单元格中仅存在一个目标;2) 各无人机之 间通信良好,不考虑通信延迟、中断带来的影响; 3) 无人机平台必须能够自主运行;4) 假定无人机 集群固定在平稳的飞行高度,可保证磁探仪测量 精度和对地分辨率。 本文旨在用一组无人机探测存在障碍物的大 规模非结构化环境的动态和静态目标,通过合适 的目标函数来衡量进程的质量,其中探测器的感 知半径随环境和目标实时变化。本文将预期观测 时间作为任务目标函数,通过最小化发现给定静 态目标所需的时间,或者通过最大化一定搜索时 间内发现动态目标的平均数量来优化总体质量, 目标发现率不小于 95% 视为完成任务。 ·290· 智 能 系 统 学 报 第 15 卷