正在加载图片...
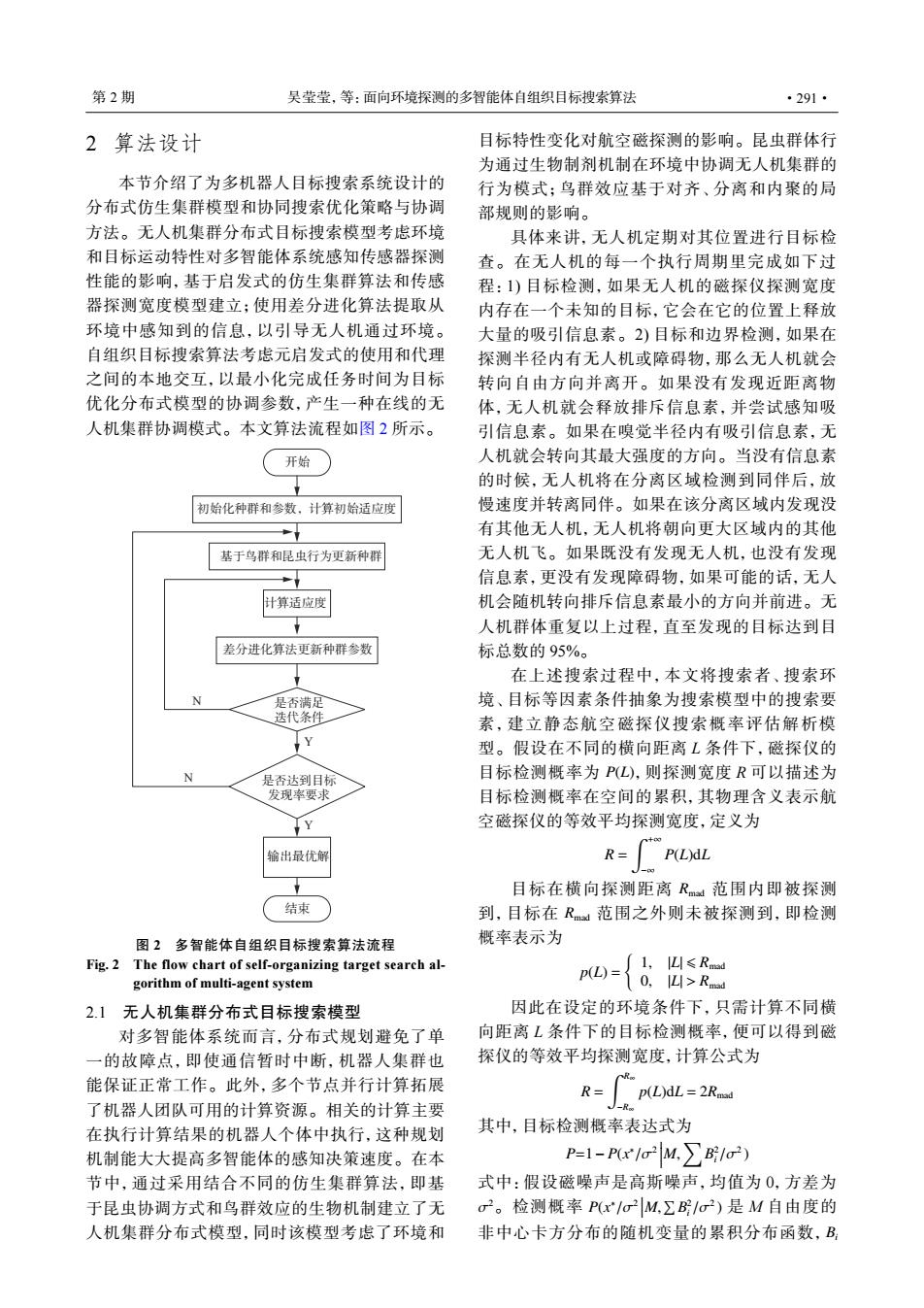
第2期 吴莹莹,等:面向环境探测的多智能体自组织目标搜索算法 ·291· 2算法设计 目标特性变化对航空磁探测的影响。昆虫群体行 为通过生物制剂机制在环境中协调无人机集群的 本节介绍了为多机器人目标搜索系统设计的 行为模式;鸟群效应基于对齐、分离和内聚的局 分布式仿生集群模型和协同搜索优化策略与协调 部规则的影响。 方法。无人机集群分布式目标搜索模型考虑环境 具体来讲,无人机定期对其位置进行目标检 和目标运动特性对多智能体系统感知传感器探测 查。在无人机的每一个执行周期里完成如下过 性能的影响,基于启发式的仿生集群算法和传感 程:1)目标检测,如果无人机的磁探仪探测宽度 器探测宽度模型建立;使用差分进化算法提取从 内存在一个未知的目标,它会在它的位置上释放 环境中感知到的信息,以引导无人机通过环境。 大量的吸引信息素。2)目标和边界检测,如果在 自组织目标搜索算法考虑元启发式的使用和代理 探测半径内有无人机或障碍物,那么无人机就会 之间的本地交互,以最小化完成任务时间为目标 转向自由方向并离开。如果没有发现近距离物 优化分布式模型的协调参数,产生一种在线的无 体,无人机就会释放排斥信息素,并尝试感知吸 人机集群协调模式。本文算法流程如图2所示。 引信息素。如果在嗅觉半径内有吸引信息素,无 开始 人机就会转向其最大强度的方向。当没有信息素 的时候,无人机将在分离区域检测到同伴后,放 初始化种群和参数。计算初始适应度 慢速度并转离同伴。如果在该分离区域内发现没 * 有其他无人机,无人机将朝向更大区域内的其他 基于鸟群和昆虫行为更新种群 无人机飞。如果既没有发现无人机,也没有发现 信息素,更没有发现障碍物,如果可能的话,无人 计算适应度 机会随机转向排斥信息素最小的方向并前进。无 人机群体重复以上过程,直至发现的目标达到目 差分进化算法更新种群参数 标总数的95%。 在上述搜索过程中,本文将搜索者、搜索环 N 是否满足 境、目标等因素条件抽象为搜索模型中的搜索要 选代条件 素,建立静态航空磁探仪搜索概率评估解析模 y 型。假设在不同的横向距离L条件下,磁探仪的 是否达到目标 目标检测概率为P(),则探测宽度R可以描述为 发现率要求 目标检测概率在空间的累积,其物理含义表示航 空磁探仪的等效平均探测宽度,定义为 n+eo 输出最优解 R= P(LdL J-四 目标在横向探测距离R范围内即被探测 结束 到,目标在R范围之外则未被探测到,即检测 图2多智能体自组织目标搜索算法流程 概率表示为 Fig.2 The flow chart of self-organizing target search al- ∫1,凹≤Rd gorithm of multi-agent system pD=0,☑>R 2.1无人机集群分布式目标搜索模型 因此在设定的环境条件下,只需计算不同横 对多智能体系统而言,分布式规划避免了单 向距离L条件下的目标检测概率,便可以得到磁 一的故障点,即使通信暂时中断,机器人集群也 探仪的等效平均探测宽度,计算公式为 能保证正常工作。此外,多个节点并行计算拓展 R R= p(L)dL=2Rmad 了机器人团队可用的计算资源。相关的计算主要 -R 在执行计算结果的机器人个体中执行,这种规划 其中,目标检测概率表达式为 机制能大大提高多智能体的感知决策速度。在本 P=1-Pr12M,∑B1c) 节中,通过采用结合不同的仿生集群算法,即基 式中:假设磁噪声是高斯噪声,均值为0,方差为 于昆虫协调方式和鸟群效应的生物机制建立了无 σ2。检测概率P(x/2M,∑B/σ2)是M自由度的 人机集群分布式模型,同时该模型考虑了环境和 非中心卡方分布的随机变量的累积分布函数,B:2 算法设计 本节介绍了为多机器人目标搜索系统设计的 分布式仿生集群模型和协同搜索优化策略与协调 方法。无人机集群分布式目标搜索模型考虑环境 和目标运动特性对多智能体系统感知传感器探测 性能的影响,基于启发式的仿生集群算法和传感 器探测宽度模型建立;使用差分进化算法提取从 环境中感知到的信息,以引导无人机通过环境。 自组织目标搜索算法考虑元启发式的使用和代理 之间的本地交互,以最小化完成任务时间为目标 优化分布式模型的协调参数,产生一种在线的无 人机集群协调模式。本文算法流程如图 2 所示。 开始 基于鸟群和昆虫行为更新种群 计算适应度 是否满足 迭代条件 输出最优解 结束 差分进化算法更新种群参数 是否达到目标 发现率要求 初始化种群和参数,计算初始适应度 Y Y N N 图 2 多智能体自组织目标搜索算法流程 Fig. 2 The flow chart of self-organizing target search algorithm of multi-agent system 2.1 无人机集群分布式目标搜索模型 对多智能体系统而言,分布式规划避免了单 一的故障点,即使通信暂时中断,机器人集群也 能保证正常工作。此外,多个节点并行计算拓展 了机器人团队可用的计算资源。相关的计算主要 在执行计算结果的机器人个体中执行,这种规划 机制能大大提高多智能体的感知决策速度。在本 节中,通过采用结合不同的仿生集群算法,即基 于昆虫协调方式和鸟群效应的生物机制建立了无 人机集群分布式模型,同时该模型考虑了环境和 目标特性变化对航空磁探测的影响。昆虫群体行 为通过生物制剂机制在环境中协调无人机集群的 行为模式;鸟群效应基于对齐、分离和内聚的局 部规则的影响。 具体来讲,无人机定期对其位置进行目标检 查。在无人机的每一个执行周期里完成如下过 程:1) 目标检测,如果无人机的磁探仪探测宽度 内存在一个未知的目标,它会在它的位置上释放 大量的吸引信息素。2) 目标和边界检测,如果在 探测半径内有无人机或障碍物,那么无人机就会 转向自由方向并离开。如果没有发现近距离物 体,无人机就会释放排斥信息素,并尝试感知吸 引信息素。如果在嗅觉半径内有吸引信息素,无 人机就会转向其最大强度的方向。当没有信息素 的时候,无人机将在分离区域检测到同伴后,放 慢速度并转离同伴。如果在该分离区域内发现没 有其他无人机,无人机将朝向更大区域内的其他 无人机飞。如果既没有发现无人机,也没有发现 信息素,更没有发现障碍物,如果可能的话,无人 机会随机转向排斥信息素最小的方向并前进。无 人机群体重复以上过程,直至发现的目标达到目 标总数的 95%。 P(L) 在上述搜索过程中,本文将搜索者、搜索环 境、目标等因素条件抽象为搜索模型中的搜索要 素,建立静态航空磁探仪搜索概率评估解析模 型。假设在不同的横向距离 L 条件下,磁探仪的 目标检测概率为 ,则探测宽度 R 可以描述为 目标检测概率在空间的累积,其物理含义表示航 空磁探仪的等效平均探测宽度,定义为 R = ∫ +∞ −∞ P(L)dL Rmad Rmad 目标在横向探测距离 范围内即被探测 到,目标在 范围之外则未被探测到,即检测 概率表示为 p(L) = { 1, |L| ⩽ Rmad 0, |L| > Rmad 因此在设定的环境条件下,只需计算不同横 向距离 L 条件下的目标检测概率,便可以得到磁 探仪的等效平均探测宽度,计算公式为 R = ∫ R∞ −R∞ p(L)dL = 2Rmad 其中,目标检测概率表达式为 P=1− P(x ∗ /σ2
M, ∑ B 2 i /σ2 ) σ 2 P(x ∗ /σ2
M, ∑ B 2 i /σ2 ) Bi 式中:假设磁噪声是高斯噪声,均值为 0,方差为 。检测概率 是 M 自由度的 非中心卡方分布的随机变量的累积分布函数, 第 2 期 吴莹莹,等:面向环境探测的多智能体自组织目标搜索算法 ·291·