正在加载图片...
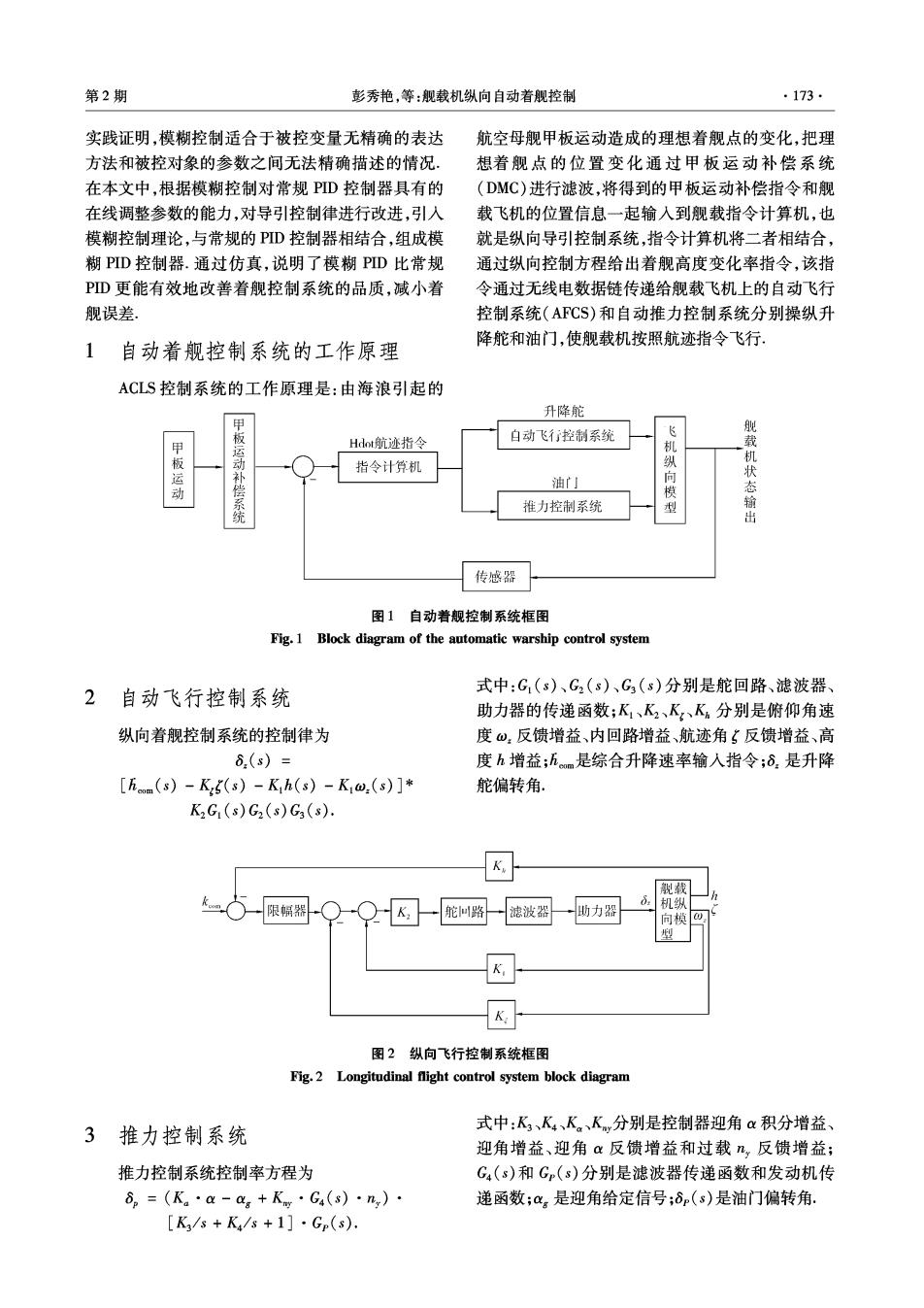
第2期 彭秀艳,等:舰载机纵向自动着舰控制 ·173· 实践证明,模糊控制适合于被控变量无精确的表达 航空母舰甲板运动造成的理想着舰点的变化,把理 方法和被控对象的参数之间无法精确描述的情况: 想着舰点的位置变化通过甲板运动补偿系统 在本文中,根据模糊控制对常规PID控制器具有的 (DMC)进行滤波,将得到的甲板运动补偿指令和舰 在线调整参数的能力,对导引控制律进行改进,引入 载飞机的位置信息一起输入到舰载指令计算机,也 模糊控制理论,与常规的PD控制器相结合,组成模 就是纵向导引控制系统,指令计算机将二者相结合, 糊PD控制器.通过仿真,说明了模糊PD比常规 通过纵向控制方程给出着舰高度变化率指令,该指 PD更能有效地改善着舰控制系统的品质,减小着 令通过无线电数据链传递给舰载飞机上的自动飞行 舰误差 控制系统(AFCS)和自动推力控制系统分别操纵升 1自动着舰控制系统的工作原理 降舵和油门,使舰载机按照航迹指令飞行, ACLS控制系统的工作原理是:由海浪引起的 升降舵 白动飞控制系统 甲 Hdt航迹指令 板运动 板运动补偿系统 指令计算机 油」 机纵向模型 推力控制系统 状态输出 传感器 图1自动着舰控制系统框图 Fig.1 Block diagram of the automatic warship control system 式中:G,(s)、G2(s)、G3(s)分别是舵回路、滤波器、 2自动飞行控制系统 助力器的传递函数;K1、K2、K,、K,分别是俯仰角速 纵向着舰控制系统的控制律为 度ω:反馈增益、内回路增益、航迹角(反馈增益、高 6.(s)= 度h增益;五m是综合升降速率输入指令;6.是升降 [h(s)-K6(s)-K,h(s)-Ka.(s)]* 舵偏转角。 K2G1(s)G2(s)G3(s). K.h 飘载 限解器Q一QK一舵路一滤波器 一助力器 机纵 向模 型 & 图2纵向飞行控制系统框图 Fig.2 Longitudinal flight control system block diagram 3 推力控制系统 式中:K3、K4、K。、K分别是控制器迎角a积分增益 迎角增益、迎角:反馈增益和过载几,反馈增益; 推力控制系统控制率方程为 G4(s)和G(s)分别是滤波器传递函数和发动机传 6。=(K。·a-ag+Kw·G4(s)·n,)· 递函数;a,是迎角给定信号;δ(s)是油门偏转角. [K3/s+K4/s+1]·G(s)