正在加载图片...
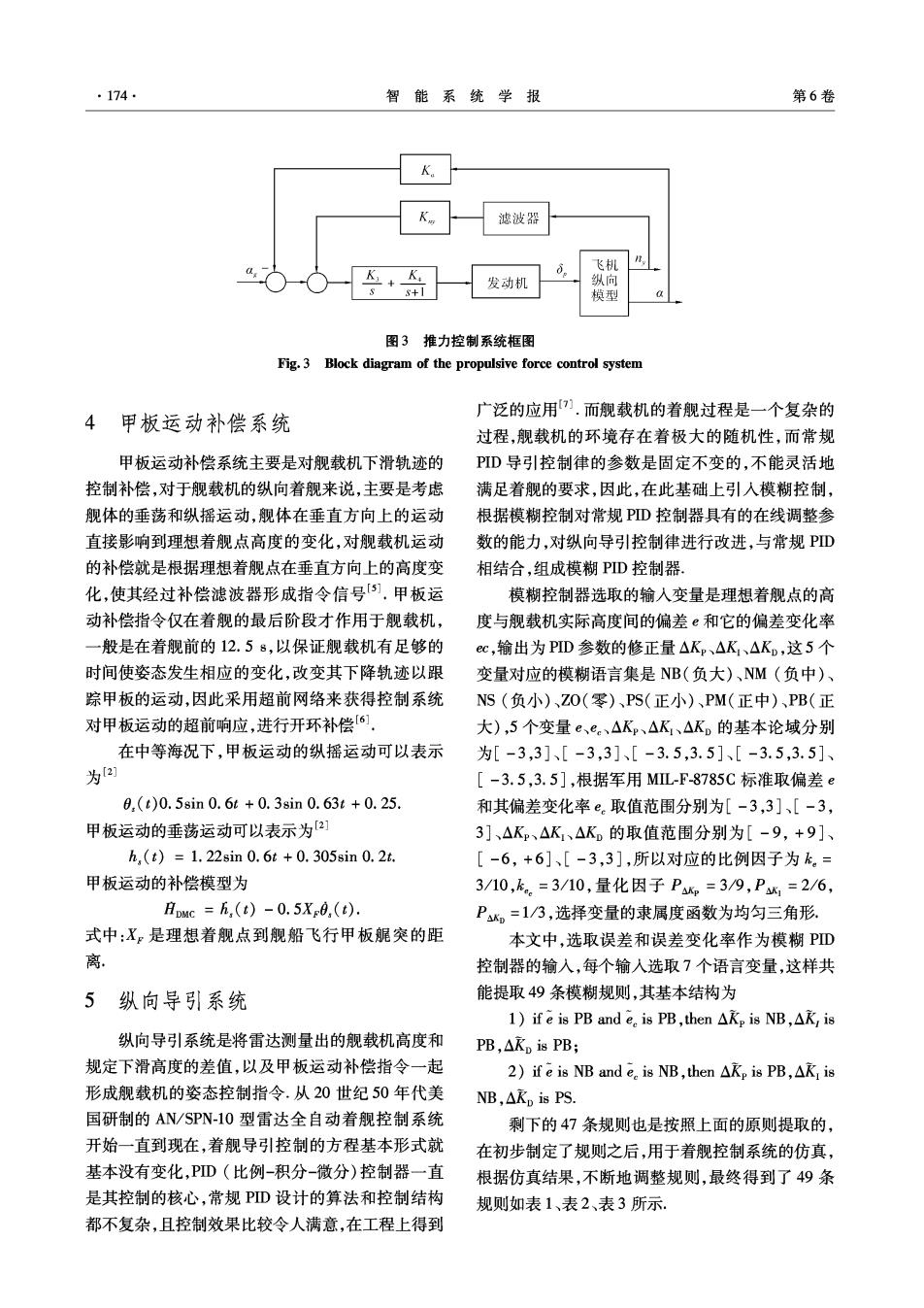
·174: 智能系统学报 第6卷 滤波器 飞机 , + 0。 发动机 纵向 8+1 模型 图3推力控制系统框图 Fig.3 Block diagram of the propulsive force control system 广泛的应用们.而舰载机的着舰过程是一个复杂的 4甲板运动补偿系统 过程,舰载机的环境存在着极大的随机性,而常规 甲板运动补偿系统主要是对舰载机下滑轨迹的 PD导引控制律的参数是固定不变的,不能灵活地 控制补偿,对于舰载机的纵向着舰来说,主要是考虑 满足着舰的要求,因此,在此基础上引入模糊控制, 舰体的垂荡和纵摇运动,舰体在垂直方向上的运动 根据模糊控制对常规PD控制器具有的在线调整参 直接影响到理想着舰点高度的变化,对舰载机运动 数的能力,对纵向导引控制律进行改进,与常规PD 的补偿就是根据理想着舰点在垂直方向上的高度变 相结合,组成模糊PD控制器. 化,使其经过补偿滤波器形成指令信号).甲板运 模糊控制器选取的输入变量是理想着舰点的高 动补偿指令仅在着舰的最后阶段才作用于舰载机, 度与舰载机实际高度间的偏差e和它的偏差变化率 般是在着舰前的12.58,以保证舰载机有足够的 ec,输出为PID参数的修正量△Kp、△K、△Kp,这5个 时间使姿态发生相应的变化,改变其下降轨迹以跟 变量对应的模糊语言集是NB(负大)、NM(负中)、 踪甲板的运动,因此采用超前网络来获得控制系统 NS(负小)、Z0(零)、PS(正小)、PM(正中)、PB(正 对甲板运动的超前响应,进行开环补偿6 大),5个变量e、e。、△Kp、△K、△Kb的基本论域分别 在中等海况下,甲板运动的纵摇运动可以表示 为[-3,3]、[-3,3]、[-3.5,3.5]、[-3.5,3.5]、 为2 [-3.5,3.5],根据军用ML-F-8785C标准取偏差e 0.(t)0.5sin0.6t+0.3sin0.63t+0.25. 和其偏差变化率e.取值范围分别为[-3,3]、[-3, 甲板运动的垂荡运动可以表示为2] 3]、△Kp、△K、△K,的取值范围分别为[-9,+9]、 h,(t)=1.22sin0.6t+0.305sin0.2t. [-6,+6]、[-3,3],所以对应的比例因子为k。= 甲板运动的补偿模型为 3/10,k。.=3/10,量化因子P4x。=3/9,Px1=2/6, Hwc=五,(t)-0.5Xs0,(t). P4w。=1/3,选择变量的隶属度函数为均匀三角形. 式中:X。是理想着舰点到舰船飞行甲板艉突的距 本文中,选取误差和误差变化率作为模糊PD 离。 控制器的输入,每个输入选取7个语言变量,这样共 5纵向导引系统 能提取49条模糊规则,其基本结构为 l)if e is PB and e。isPB,then△Kp is NB,△k,is 纵向导引系统是将雷达测量出的舰载机高度和 PB,△Kp is PB; 规定下滑高度的差值,以及甲板运动补偿指令一起 2)if e is NB and e。isNB,then△Kp is PB,△Kis 形成舰载机的姿态控制指令.从20世纪50年代美 NB,△Kp is PS. 国研制的AN/SPN-10型雷达全自动着舰控制系统 剩下的47条规则也是按照上面的原则提取的, 开始一直到现在,着舰导引控制的方程基本形式就 在初步制定了规则之后,用于着舰控制系统的仿真, 基本没有变化,PD(比例-积分-微分)控制器一直 根据仿真结果,不断地调整规则,最终得到了49条 是其控制的核心,常规PD设计的算法和控制结构 规则如表1、表2、表3所示 都不复杂,且控制效果比较令人满意,在工程上得到