正在加载图片...
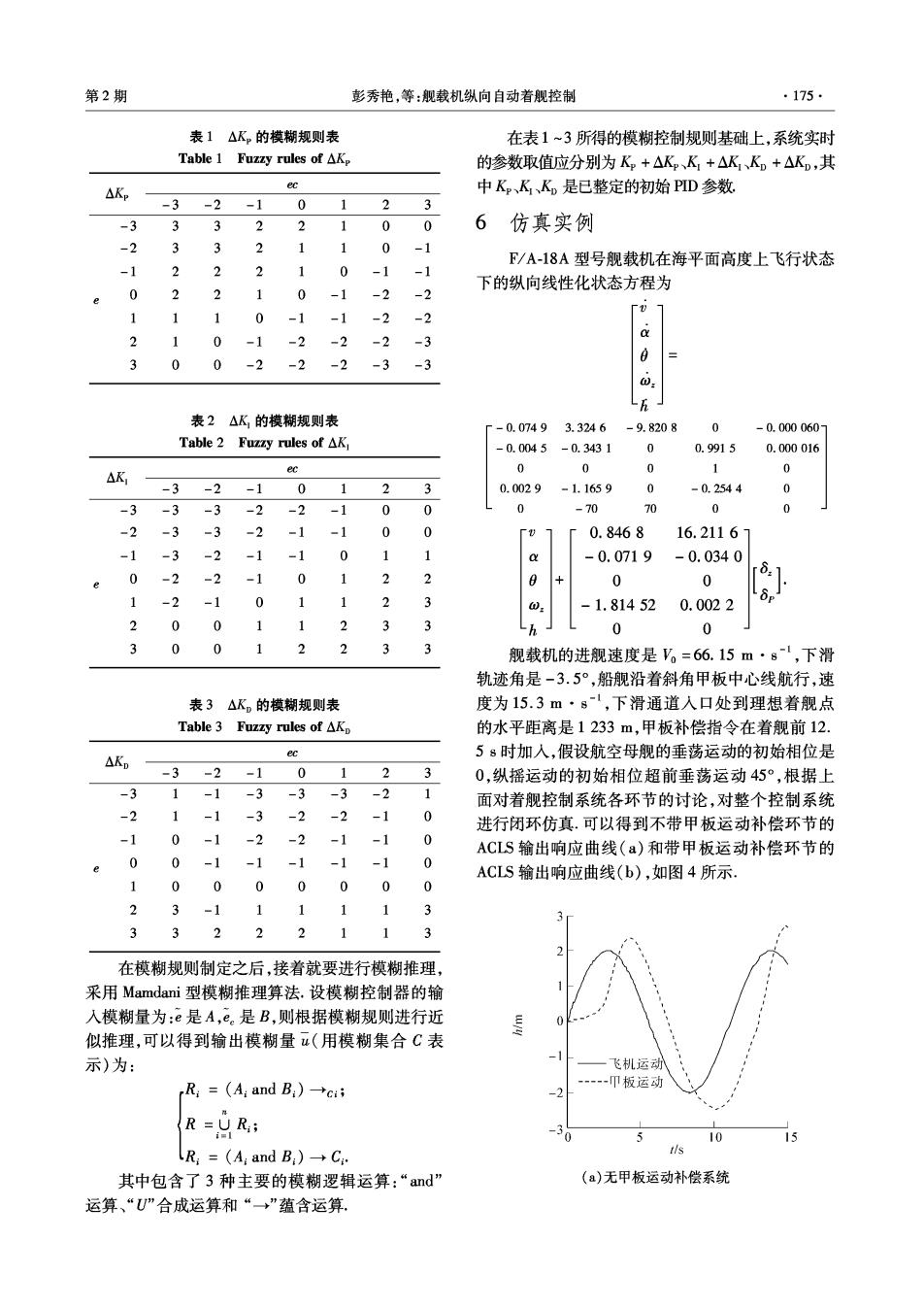
第2期 彭秀艳,等:舰载机纵向自动着舰控制 ·175· 表1△K,的模糊规则表 在表1~3所得的模糊控制规则基础上,系统实时 Table 1 Fuzzy rules of AKp 的参数取值应分别为K,+△K、K+△K1、K,+△Kp,其 ec △Kp 中K,、K、K,是已整定的初始PID参数. -3-2-10 123 -3 332210 0 6仿真实例 -2 3 3 21 10 -1 F/A-18A型号舰载机在海平面高度上飞行状态 -1 2 2 2 1 0 -1 -1 下的纵向线性化状态方程为 0 2 1 0-1 -2 -2 e 0-1 -1 -2 -2 2 1 0 -1 -2 -2 -2 -3 3 0 0 -2 -2 -2 -3 -3 表2△K的模糊规则表 r-0.07493.3246 -9.8208 0 -0.000060 Table 2 Fuzzy rules of AK -0.0045 -0.3431 0 0.9915 0.000016 ec 0 0 0 1 0 △K -3-2-10 123 0.0029 -1.1659 0 -0.2544 0 -3 -3 -3-2-2-1 0 0 0 -70 70 0 0 -2 -3 -3 -2 -1 -1 0 0 0.8468 16.2116 -1 -3 -2 -1 -1 0 1 1 a -0.0719 -0.0340 0 -2 -2 -1 0 1 e 0 0 1 -2 -1 0 1 1 2 3 -1.81452 0.0022 2 0 0 1 1 2 3 3 h 0 0 3 0 1 2 2 3 3 舰载机的进舰速度是V。=66.15m·g1,下滑 轨迹角是-3.5°,船舰沿着斜角甲板中心线航行,速 表3△K,的模糊规则表 度为15.3m·81,下滑通道入口处到理想着舰点 Table 3 Fuzzy rules of AKp 的水平距离是1233m,甲板补偿指令在着舰前12. ec 5:时加入,假设航空母舰的垂荡运动的初始相位是 △KD -3-2-1012 3 0,纵摇运动的初始相位超前垂荡运动45°,根据上 -3 1 -1 -3 -3-3 -2 1 面对着舰控制系统各环节的讨论,对整个控制系统 -2 1 -1 -3 -2 -2 -1 0 进行闭环仿真.可以得到不带甲板运动补偿环节的 -1 0 -1 -2 -2 -1 -1 0 ACLS输出响应曲线(a)和带甲板运动补偿环节的 0 0 -1 -1 -1 -1 -1 0 ACLS输出响应曲线(b),如图4所示. 1 0 0 0 0 0 0 0 2 3 -1 1 1 3 2 1 1 在模糊规则制定之后,接着就要进行模糊推理, 采用Mamdani型模糊推理算法.设模糊控制器的输 入模糊量为:e是A,e。是B,则根据模糊规则进行近 似推理,可以得到输出模糊量u(用模糊集合C表 示)为: 飞机运动 R:=(A:andB:)→c --印板运动 -2 R=出R: 30 5 10 R:=(A:andB:)→C 其中包含了3种主要的模糊逻辑运算:“and” (a)无甲板运动补偿系统 运算、“U”合成运算和“→”蕴含运算