正在加载图片...
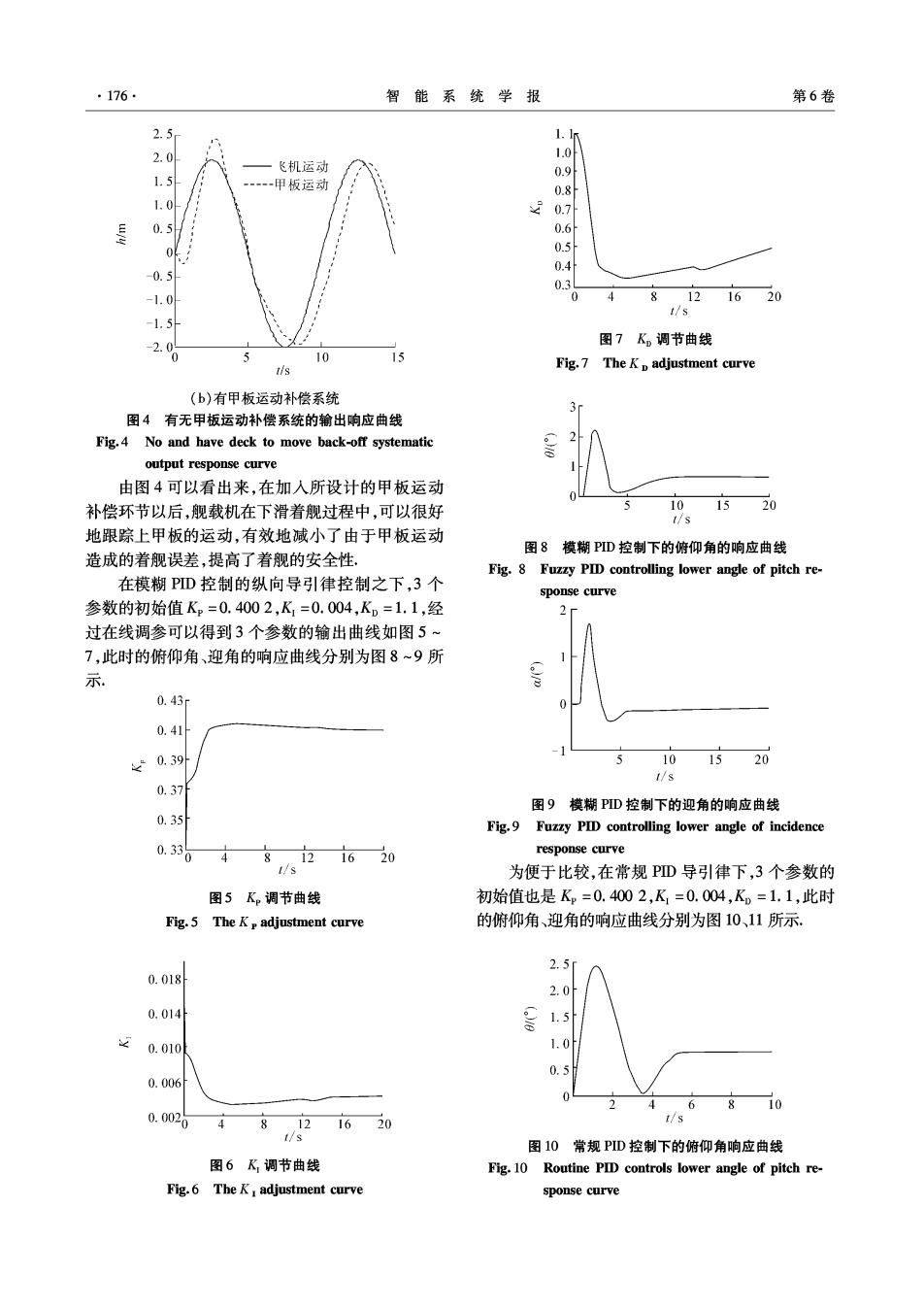
·176· 智能系统学报 第6卷 2.5 1. 2.0 1.0 飞机运动 1.5 0.9 甲板运动 0.8 1.0 0.7 0.5 0.6 0 0.5 0.4 0.5 0.3 -1.0 8121620 t/s -1.5 图7K,调节曲线 5 10 15 tis Fig.7 The Kp adjustment curve (b)有甲板运动补偿系统 图4有无甲板运动补偿系统的输出响应曲线 Fig.4 No and have deck to move back-off systematic output response curve 由图4可以看出来,在加入所设计的甲板运动 补偿环节以后,舰载机在下滑着舰过程中,可以很好 101520 t/s 地跟踪上甲板的运动,有效地减小了由于甲板运动 图8模糊PID控制下的俯仰角的响应曲线 造成的着舰误差,提高了着舰的安全性. Fig.8 Fuzzy PID controlling lower angle of pitch re- 在模糊PD控制的纵向导引律控制之下,3个 sponse curve 参数的初始值Kp=0.4002,K1=0.004,Kp=1.1,经 过在线调参可以得到3个参数的输出曲线如图5~ 7,此时的俯仰角、迎角的响应曲线分别为图8~9所 示 0.43 0.41 0.39 101520 1/s 0.37 图9模糊PD控制下的迎角的响应曲线 0.35 Fig.9 Fuzzy PID controlling lower angle of incidence 0.330 4 8121620 response curve t/s 为便于比较,在常规PD导引律下,3个参数的 图5K,调节曲线 初始值也是K,=0.4002,K=0.004,K,=1.1,此时 Fig.5 The Kr adjustment curve 的俯仰角、迎角的响应曲线分别为图10、11所示. 2.5 0.018 2.0 0.014 1.5 0.010 1.0 0.5 0.006 46810 0.0020 4 8121620 t/s t/s 图10常规PD控制下的俯仰角响应曲线 图6K,调节曲线 Fig.10 Routine PID controls lower angle of pitch re- Fig.6 The K,adjustment curve sponse curve