正在加载图片...
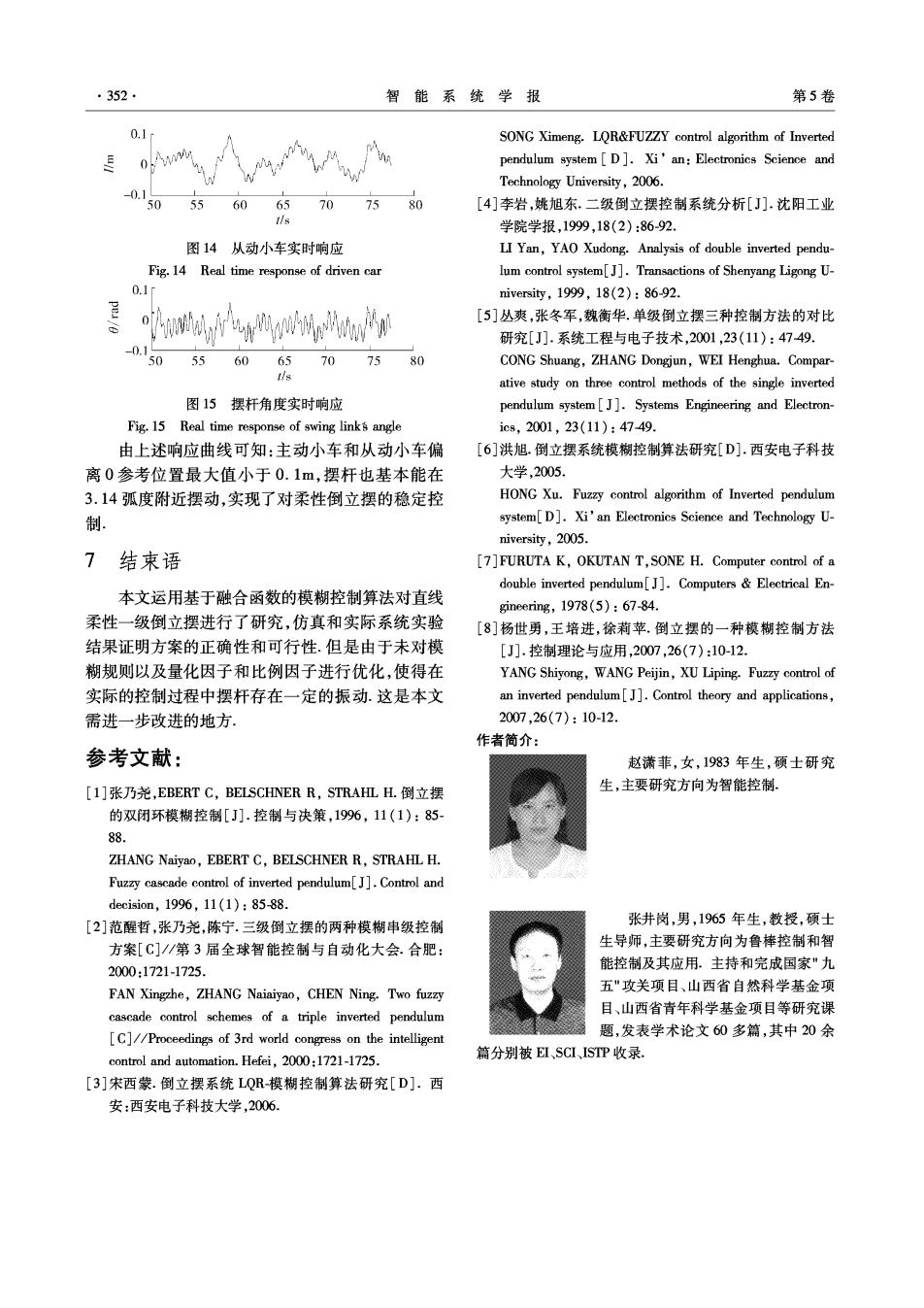
·352· 智能系统学报 第5卷 0.1 SONG Ximeng.LQR&FUZZY control algorithm of Inverted pendulum system [D].Xi'an:Electronics Science and Technology University,2006. 0. 50 55 60 65 70 75 80 [4]李岩,姚旭东.二级倒立摆控制系统分析[J刀.沈阳工业 tis 学院学报,1999,18(2):8692. 图14从动小车实时响应 LI Yan,YAO Xudong.Analysis of double inverted pendu- Fig.14 Real time response of driven car lum control system[J].Transactions of Shenyang Ligong U- 0.1r niversity,1999,18(2):8692. 目典w [5]丛爽,张冬军,魏衡华.单级倒立摆三种控制方法的对比 研究[J].系统工程与电子技术,2001,23(11):4749. -0.1 505560657075 80 CONG Shuang,ZHANG Dongjun,WEI Henghua.Compar- /8 ative study on three control methods of the single inverted 图15摆杆角度实时响应 pendulum system[J].Systems Engineering and Electron- Fig.15 Real time response of swing links angle ics,2001,23(11):47-49. 由上述响应曲线可知:主动小车和从动小车偏 [6]洪旭.倒立摆系统模糊控制算法研究[D].西安电子科技 离0参考位置最大值小于0.1m,摆杆也基本能在 大学,2005. 3.14弧度附近摆动,实现了对柔性倒立摆的稳定控 HONG Xu.Fuzzy control algorithm of Inverted pendulum 制 system[D].Xi'an Electronics Science and Technology U- niversity,2005. 7结束语 [7]FURUTA K,OKUTAN T,SONE H.Computer control of a double inverted pendulum[J].Computers Electrical En- 本文运用基于融合函数的模糊控制算法对直线 gineering,1978(5):67-84. 柔性一级倒立摆进行了研究,仿真和实际系统实验 [8]杨世勇,王培进,徐莉苹.倒立摆的一种模糊控制方法 结果证明方案的正确性和可行性.但是由于未对模 [J].控制理论与应用,2007,26(7):10-12. 糊规则以及量化因子和比例因子进行优化,使得在 YANG Shiyong,WANG Peijin,XU Liping.Fuzzy control of 实际的控制过程中摆杆存在一定的振动.这是本文 an inverted pendulum[J].Control theory and applications, 需进一步改进的地方。 2007,26(7):10-12 作者简介: 参考文献: 赵满菲,女,1983年生,硕士研究 [1]张乃尧,EBERT C,BELSCHNER R,STRAHL H.倒立摆 生,主要研究方向为智能控制。 的双闭环模糊控制[J].控制与决策,1996,11(1):85- 88. ZHANG Naiyao,EBERT C,BELSCHNER R,STRAHL H. Fuzzy cascade control of inverted pendulum[J].Control and decision,1996,11(1):8588. [2]范醒哲,张乃尧,陈宁.三级倒立摆的两种模糊串级控制 张井岗,男,1965年生,教授,硕士 方案[C]/第3届全球智能控制与自动化大会.合肥: 生导师,主要研究方向为鲁棒控制和智 2000:1721-1725. 能控制及其应用.主持和完成国家"九 FAN Xingzhe,ZHANG Naiaiyao,CHEN Ning.Two fuzzy 五"攻关项目、山西省自然科学基金项 cascade control schemes of a triple inverted pendulum 目、山西省青年科学基金项目等研究课 [C]//Proceedings of 3rd world congress on the intelligent 题,发表学术论文60多篇,其中20余 control and automation.Hefei,2000:1721-1725 篇分别被EI、SCI、ISTP收录, [3]宋西蒙.倒立摆系统LQR-模糊控制算法研究[D].西 安:西安电子科技大学,2006