正在加载图片...
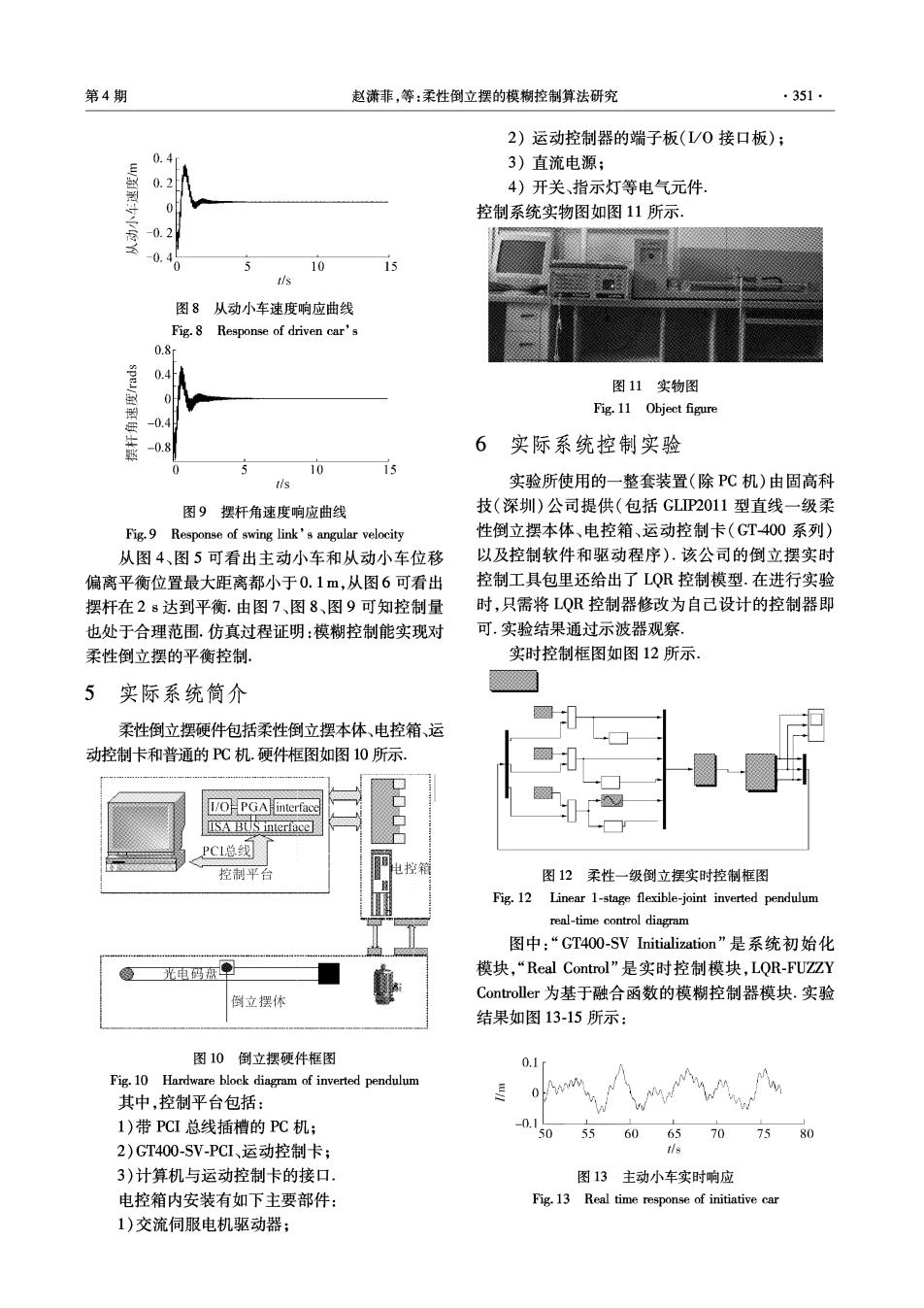
第4期 赵潇菲,等:柔性倒立摆的模糊控制算法研究 .351· 2)运动控制器的端子板(I/0接口板); 0.4 3)直流电源; 0.2 4)开关、指示灯等电气元件 控制系统实物图如图11所示. -0.2 -0.4 10 15 图8从动小车速度响应曲线 Fig.8 Response of driven car's 0.8r 0. 图11实物图 Fig.11 Object figure -0 -. 6 实际系统控制实验 10 15 tis 实验所使用的一整套装置(除P℃机)由固高科 图9摆杆角速度响应曲线 技(深圳)公司提供(包括GLP2011型直线一级柔 Fig.9 Response of swing link's angular velocity 性倒立摆本体、电控箱、运动控制卡(GT400系列) 从图4、图5可看出主动小车和从动小车位移 以及控制软件和驱动程序).该公司的倒立摆实时 偏离平衡位置最大距离都小于0.1m,从图6可看出 控制工具包里还给出了LQR控制模型.在进行实验 摆杆在2s达到平衡.由图7、图8、图9可知控制量 时,只需将LQR控制器修改为自己设计的控制器即 也处于合理范围.仿真过程证明:模糊控制能实现对 可.实验结果通过示波器观察。 柔性倒立摆的平衡控制, 实时控制框图如图12所示. 5实际系统简介 柔性倒立摆硬件包括柔性倒立摆本体、电控箱、运 动控制卡和普通的P℃机.硬件框图如图10所示, I/O月PGA月interface ISA BUS interface] PCL总线 控制平台 电控箱 图12柔性一级倒立摆实时控制框图 Fig.12 Linear 1-stage flexible-joint inverted pendulum real-time control diagram 图中:“GT400-SV Initialization”是系统初始化 】 模块,“Real Control”是实时控制模块,LQR-FUZZY 倒立摆体 Controller为基于融合函数的模糊控制器模块.实验 结果如图13-15所示: 图10倒立摆硬件框图 0.1 Fig.10 Hardware block diagram of inverted pendulum 0 其中,控制平台包括: 1)带PCI总线插槽的PC机; 0.1 50 55 60 65 70 75 80 2)GT400-SV-PCI、运动控制卡; t/s 3)计算机与运动控制卡的接口。 图13主动小车实时响应 电控箱内安装有如下主要部件: Fig.13 Real time response of initiative car 1)交流伺服电机驱动器;