正在加载图片...
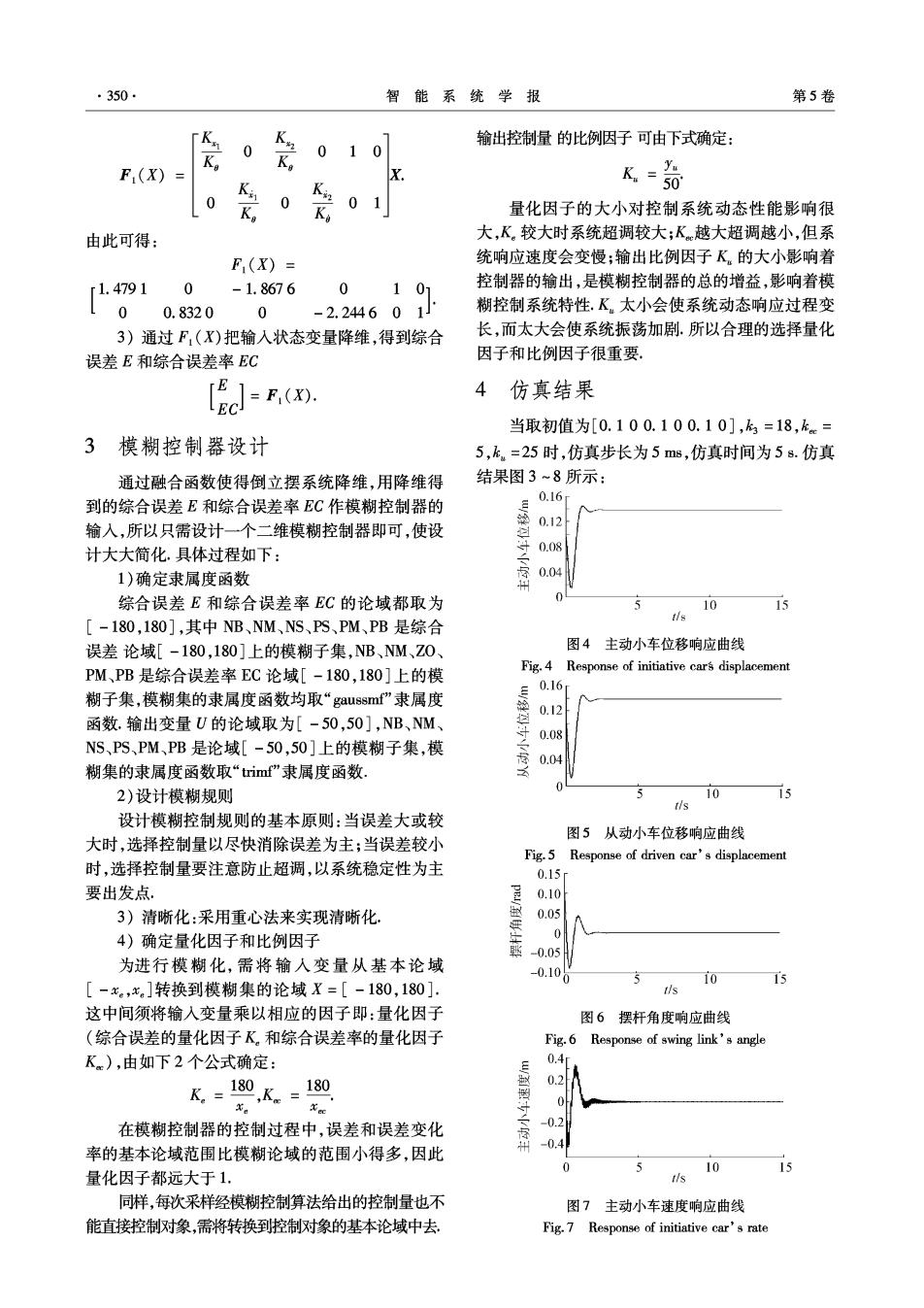
·350· 智能系统学报 第5卷 「K 0 K 输出控制量的比例因子可由下式确定: K 0 1 F,(X) K K.=50 .yu 0 0 K 0 量化因子的大小对控制系统动态性能影响很 由此可得: 大,K。较大时系统超调较大;K越大超调越小,但系 F,(X)= 统响应速度会变慢;输出比例因子K,的大小影响着 r1.4791 0 -1.8676 0 1 控制器的输出,是模糊控制器的总的增益,影响着模 L 0 0.8320 0 -2.244601J 糊控制系统特性.K,太小会使系统动态响应过程变 3)通过F,(X)把输入状态变量降维,得到综合 长,而太大会使系统振荡加剧.所以合理的选择量化 误差E和综合误差率EC 因子和比例因子很重要. 4仿真结果 当取初值为[0.100.100.10],.3=18,k= 3模糊控制器设计 5,k,=25时,仿真步长为5ms,仿真时间为58.仿真 通过融合函数使得倒立摆系统降维,用降维得 结果图3~8所示: 到的综合误差E和综合误差率EC作模糊控制器的 0.16 输人,所以只需设计一个二维模糊控制器即可,使设 0.12 计大大简化,具体过程如下: 0.08 1)确定隶属度函数 0.04 综合误差E和综合误差率EC的论域都取为 5 10 15 tis [-180,180],其中NB、NM、NS、PS、PM、PB是综合 误差论域[-180,180]上的模糊子集,NB、NM、Z0、 图4主动小车位移响应曲线 PM、PB是综合误差率EC论域[-180,180]上的模 Fig.4 Response of initiative cars displacement 0.16 糊子集,模糊集的隶属度函数均取“gaussmf'”隶属度 0.12 函数.输出变量U的论域取为[-50,50],NB、NM、 0.08 NS、PS、PM、PB是论域[-50,50]上的模糊子集,模 0.04 糊集的隶属度函数取“trim”隶属度函数、 2)设计模糊规则 5 10 15 tis 设计模糊控制规则的基本原则:当误差大或较 大时,选择控制量以尽快消除误差为主;当误差较小 图5从动小车位移响应曲线 Fig.5 Response of driven car's displacement 时,选择控制量要注意防止超调,以系统稳定性为主 0.15 要出发点, 0.10 3)清晰化:采用重心法来实现清晰化. 0.05 4)确定量化因子和比例因子 0 -0.05 为进行模糊化,需将输入变量从基本论域 0.106 10 15 [-x。,x。]转换到模糊集的论域X=[-180,180]. 这中间须将输入变量乘以相应的因子即:量化因子 图6摆杆角度响应曲线 (综合误差的量化因子K。和综合误差率的量化因子 Fig.6 Response of swing link's angle K),由如下2个公式确定: 0.4 K=180,K=180 0.2 七 04 在模糊控制器的控制过程中,误差和误差变化 -0.2 -0.4 率的基本论域范围比模糊论域的范围小得多,因此 0 10 15 量化因子都远大于1. tis 同样,每次采样经模糊控制算法给出的控制量也不 图7主动小车速度响应曲线 能直接控制对橡,需将转换到控制对橡的基本论域中去, Fig.7 Response of initiative car's rate