正在加载图片...
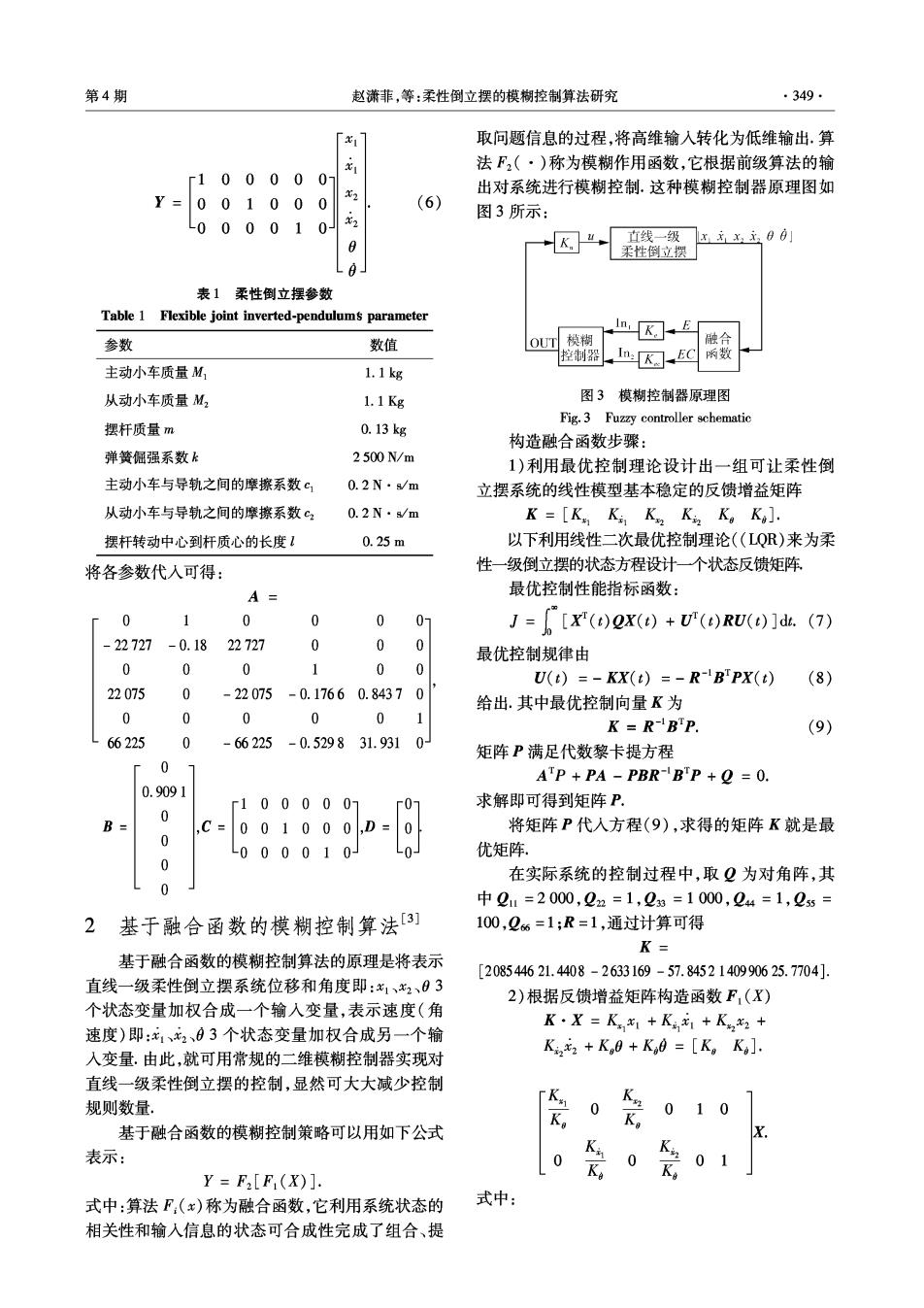
第4期 赵潇非,等:柔性倒立摆的模糊控制算法研究 ·349· 取问题信息的过程,将高维输入转化为低维输出.算 法F2(·)称为模糊作用函数,它根据前级算法的输 Γ100000- 出对系统进行模糊控制.这种模糊控制器原理图如 Y= 001000 (6) 图3所示: -0 00010 直线级 9 x元x2永200] 柔性倒立摆 表1柔性倒立摆参数 Table 1 Flexible joint inverted-pendulums parameter 榄糊 KE 参数 数值 控制器,K,EC 啊数 主动小车质量M 1.1kg 从动小车质量M2 1.1Kg 图3模糊控制器原理图 摆杆质量m 0.13kg Fig.3 Fuzzy controller schematic 构造融合函数步骤: 弹簧倔强系数k 2500N/m 1)利用最优控制理论设计出一组可让柔性倒 主动小车与导轨之间的摩擦系数© 0.2N·a/m 立摆系统的线性模型基本稳定的反馈增益矩阵 从动小车与导轨之间的摩擦系数c2 0.2N·a/m K=[K Ki Kn Ki Ko K]. 摆杆转动中心到杆质心的长度1 0.25m 以下利用线性二次最优控制理论(LQR)来为柔 将各参数代人可得: 性一级倒立摆的状态方程设计一个状态反馈矩阵 A= 最优控制性能指标函数: 0 1 0 0 0 01 J=[X()Qx()+()RU()].(7) -22727-0.1822727 0 0 0 最优控制规律由 0 0 1 0 0 U(t)=-KX(t)=-R-BPX(t) (8) 22075 0 -22075 -0.17660.84370 给出.其中最优控制向量K为 0 0 0 0 1 K=R-BTP. (9) 66225 0 -66225 -0.529831.9310 矩阵P满足代数黎卡提方程 0 ATP PA PBR-BP+=0. 0.9091 r1000001 Γ0 求解即可得到矩阵P. 0 B= ,C= 001 000,D= 将矩阵P代人方程(9),求得的矩阵K就是最 0 L000010 优矩阵. 0 在实际系统的控制过程中,取?为对角阵,其 0 中21=2000,22=1,23=1000,24=1,25= 2 基于融合函数的模糊控制算法[3] 100,Q6=1;R=1,通过计算可得 K= 基于融合函数的模糊控制算法的原理是将表示 [208544621.4408-2633169-57.8452140990625.77041. 直线一级柔性倒立摆系统位移和角度即:x1、2、03 2)根据反馈增益矩阵构造函数F,(X) 个状态变量加权合成一个输入变量,表示速度(角 K·X=K1+K花1+K,2+ 速度)即:1、2、03个状态变量加权合成另一个输 Ki+K0+K0 =[Ko Ko]. 入变量.由此,就可用常规的二维模糊控制器实现对 直线一级柔性倒立摆的控制,显然可大大减少控制 规则数量. 0 K 010 基于融合函数的模糊控制策略可以用如下公式 表示: K K 0 K 01 Y=F2[F(X)]. 式中:算法F:(x)称为融合函数,它利用系统状态的 式中: 相关性和输入信息的状态可合成性完成了组合、提