正在加载图片...
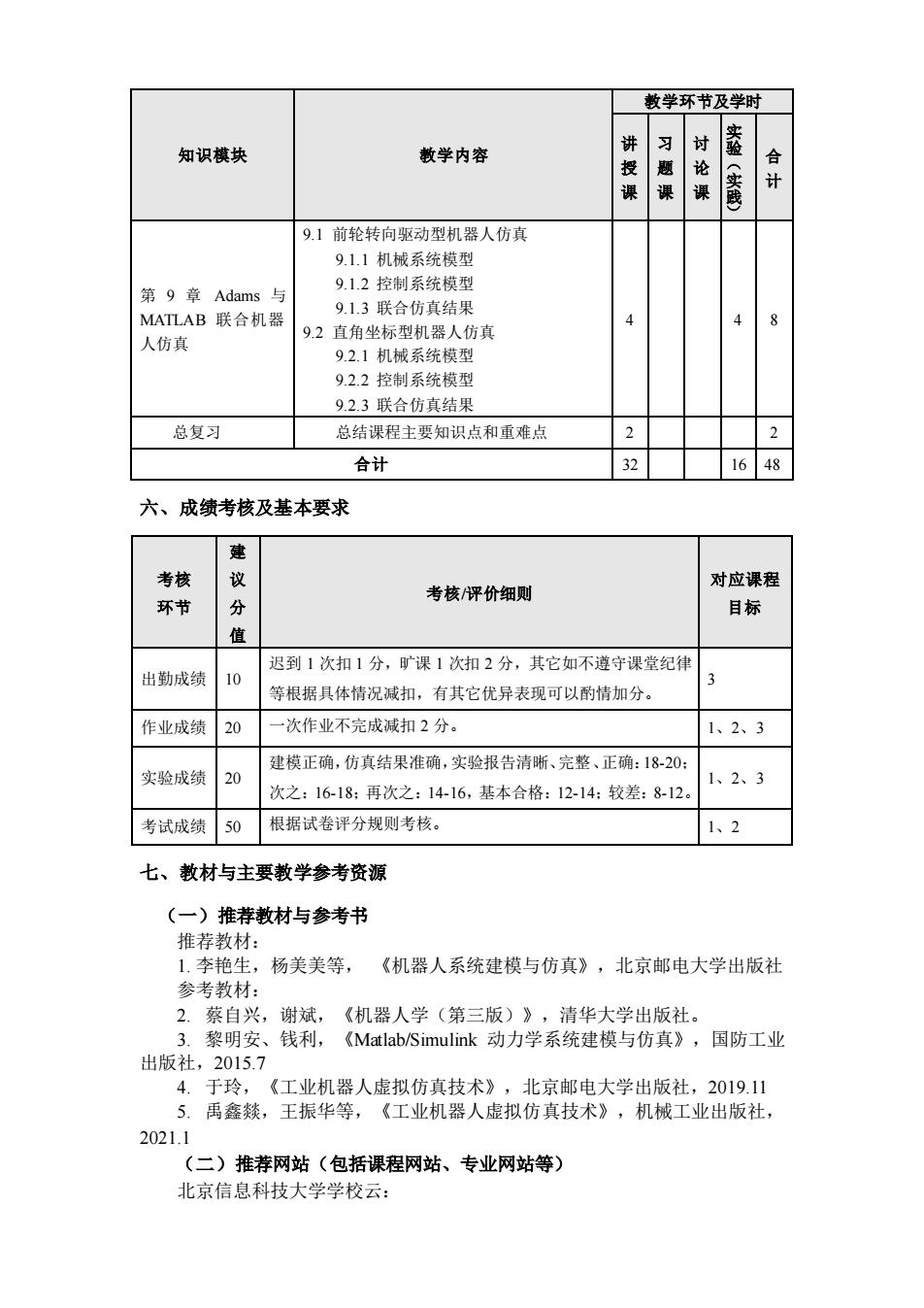
教学环节及学时 知识棋块 教学内容 讲 习 论 实验(实戰) 课 课 计 9.1前轮转向驱动型机器人仿真 9.1.1机械系统模型 9.1.2控制系统模型 第9章Adams与 9.1.3联合仿真结果 MATLAB联合机器 4 48 人仿真 9.2直角坐标型机器人仿真 9.2.1机械系统模型 9.2.2控制系统模型 9.2.3联合仿真结果 总复习 总结课程主要知识点和重难点 2 2 合计 32 16 48 六、成绩考核及基本要求 建 考核 议 对应课程 考核/评价细则 环节 分 目标 值 迟到1次扣1分,旷课1次扣2分,其它如不遵守课堂纪律 出勤成绩 10 3 等根据具体情况减扣,有其它优异表现可以酌情加分。 作业成绩 20 次作业不完成减扣2分。 1、2、3 建模正确,仿真结果准确,实验报告清晰、完整、正确:18-20: 实验成绩 20 1、2、3 次之:16-18:再次之:14-16,基本合格:12-14:较差:8-12。 考试成绩 50 根据试卷评分规则考核。 1、2 七、教材与主要教学参考资源 (一)推荐教材与参考书 推荐教材: 1.李艳生,杨美美等, 《机器人系统建模与仿真》,北京邮电大学出版社 参考教材: 2.蔡自兴,谢斌,《机器人学(第三版)》,清华大学出版社。 3.黎明安、钱利,《MatIab/.Simulink动力学系统建模与仿真》,国防工业 出版社,2015.7 4.于玲,《工业机器人虚拟仿真技术》,北京邮电大学出版社,2019.11 5.禹鑫燚,王振华等,《工业机器人虚拟仿真技术》,机械工业出版社, 2021.1 (二)推荐网站(包括课程网站、专业网站等) 北京信息科技大学学校云:知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第 9 章 Adams 与 MATLAB 联合机器 人仿真 9.1 前轮转向驱动型机器人仿真 9.1.1 机械系统模型 9.1.2 控制系统模型 9.1.3 联合仿真结果 9.2 直角坐标型机器人仿真 9.2.1 机械系统模型 9.2.2 控制系统模型 9.2.3 联合仿真结果 4 4 8 总复习 总结课程主要知识点和重难点 2 2 合计 32 16 48 六、成绩考核及基本要求 考核 环节 建 议 分 值 考核/评价细则 对应课程 目标 出勤成绩 10 迟到 1 次扣 1 分,旷课 1 次扣 2 分,其它如不遵守课堂纪律 等根据具体情况减扣,有其它优异表现可以酌情加分。 3 作业成绩 20 一次作业不完成减扣 2 分。 1、2、3 实验成绩 20 建模正确,仿真结果准确,实验报告清晰、完整、正确:18-20; 次之:16-18;再次之:14-16,基本合格:12-14;较差:8-12。 1、2、3 考试成绩 50 根据试卷评分规则考核。 1、2 七、教材与主要教学参考资源 (一)推荐教材与参考书 推荐教材: 1. 李艳生,杨美美等, 《机器人系统建模与仿真》,北京邮电大学出版社 参考教材: 2. 蔡自兴,谢斌,《机器人学(第三版)》,清华大学出版社。 3. 黎明安、钱利,《Matlab/Simulink 动力学系统建模与仿真》,国防工业 出版社,2015.7 4. 于玲,《工业机器人虚拟仿真技术》,北京邮电大学出版社,2019.11 5. 禹鑫燚,王振华等,《工业机器人虚拟仿真技术》,机械工业出版社, 2021.1 (二)推荐网站(包括课程网站、专业网站等) 北京信息科技大学学校云: