正在加载图片...
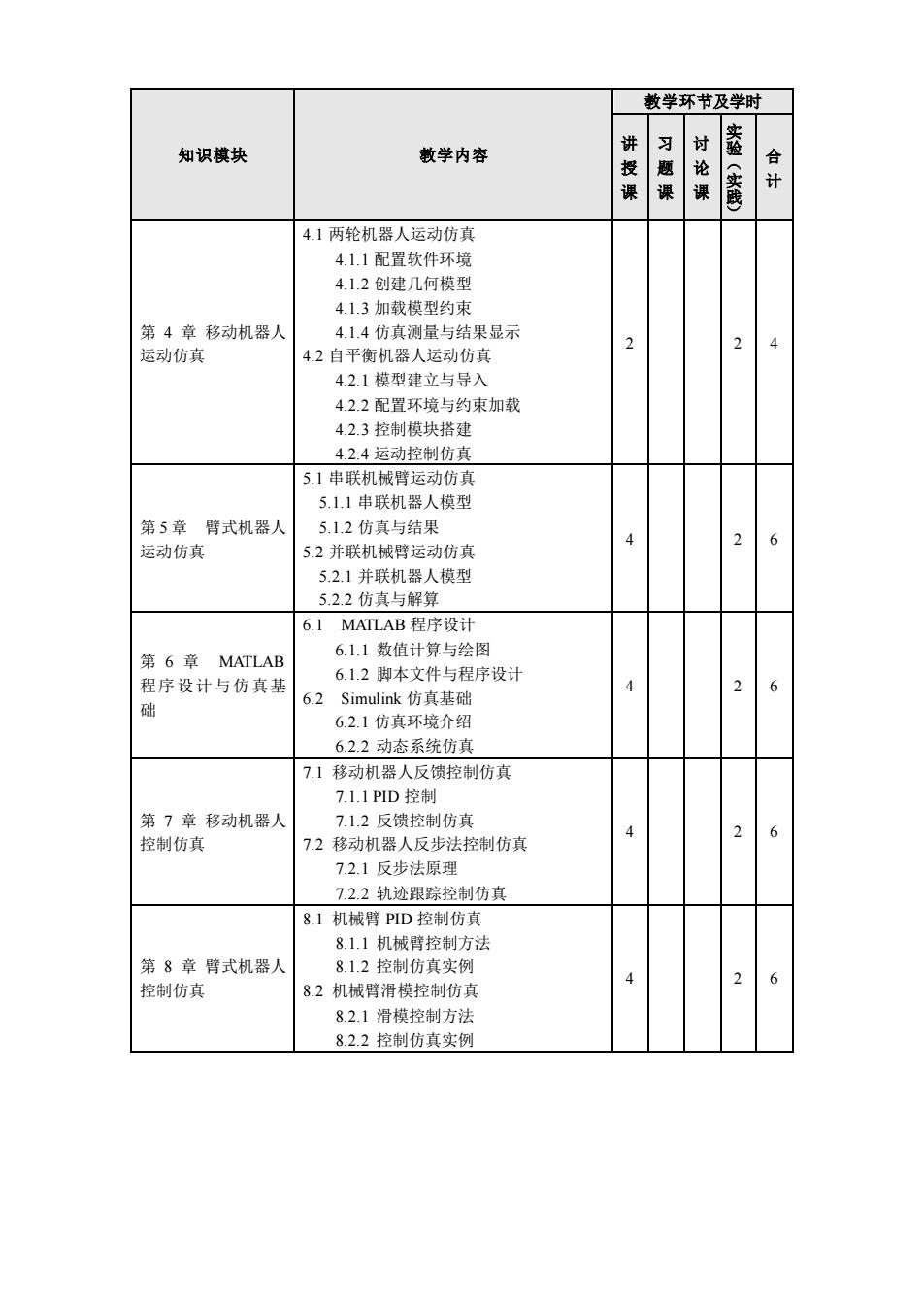
教学环节及学时 知识棋块 教学内容 讲授 习题 论课 实验(实戰) 年 41两轮机器人运动仿真 4.1.1配置软件环境 4.1.2创建几何模型 4.1.3加载模型约束 第4章移动机器人 4.1.4仿真测量与结果显示 2 24 运动仿真 4.2自平衡机器人运动仿真 4.2.1模型建立与导入 4.2.2配置环境与约束加载 4.2.3控制模块搭建 4.2.4运动控制仿真 5.1串联机械臂运动仿真 5.1.1串联机器人模型 第5章臂式机器人 5.1.2仿真与结果 4 26 运动仿真 5.2并联机械臂运动仿真 5.2.1并联机器人模型 5.2.2仿真与解算 6.1 MATLAB程序设计 第6章MATLAB 6.1.1数值计算与绘图 程序设计与仿真基 6.1.2脚本文件与程序设计 26 6.2 Simulink仿真基础 4 础 6.2.1仿真环境介绍 6.2.2动态系统仿真 7.1移动机器人反馈控制仿真 7.1.1PID控制 第7章移动机器人 7.1.2反馈控制仿真 4 2 6 控制仿真 7.2移动机器人反步法控制仿真 7.2.1反步法原理 7.2.2轨迹跟踪控制仿真 8.1机械臂PID控制仿真 8.1.1机械臂控制方法 第8章臂式机器人 8.1.2控制仿真实例 4 2 6 控制仿真 8.2机械臂滑模控制仿真 8.2.1滑模控制方法 8.2.2控制仿真实例知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第 4 章 移动机器人 运动仿真 4.1 两轮机器人运动仿真 4.1.1 配置软件环境 4.1.2 创建几何模型 4.1.3 加载模型约束 4.1.4 仿真测量与结果显示 4.2 自平衡机器人运动仿真 4.2.1 模型建立与导入 4.2.2 配置环境与约束加载 4.2.3 控制模块搭建 4.2.4 运动控制仿真 2 2 4 第 5 章 臂式机器人 运动仿真 5.1 串联机械臂运动仿真 5.1.1 串联机器人模型 5.1.2 仿真与结果 5.2 并联机械臂运动仿真 5.2.1 并联机器人模型 5.2.2 仿真与解算 4 2 6 第 6 章 MATLAB 程序设计与仿真基 础 6.1 MATLAB 程序设计 6.1.1 数值计算与绘图 6.1.2 脚本文件与程序设计 6.2 Simulink 仿真基础 6.2.1 仿真环境介绍 6.2.2 动态系统仿真 4 2 6 第 7 章 移动机器人 控制仿真 7.1 移动机器人反馈控制仿真 7.1.1 PID 控制 7.1.2 反馈控制仿真 7.2 移动机器人反步法控制仿真 7.2.1 反步法原理 7.2.2 轨迹跟踪控制仿真 4 2 6 第 8 章 臂式机器人 控制仿真 8.1 机械臂 PID 控制仿真 8.1.1 机械臂控制方法 8.1.2 控制仿真实例 8.2 机械臂滑模控制仿真 8.2.1 滑模控制方法 8.2.2 控制仿真实例 4 2 6