正在加载图片...
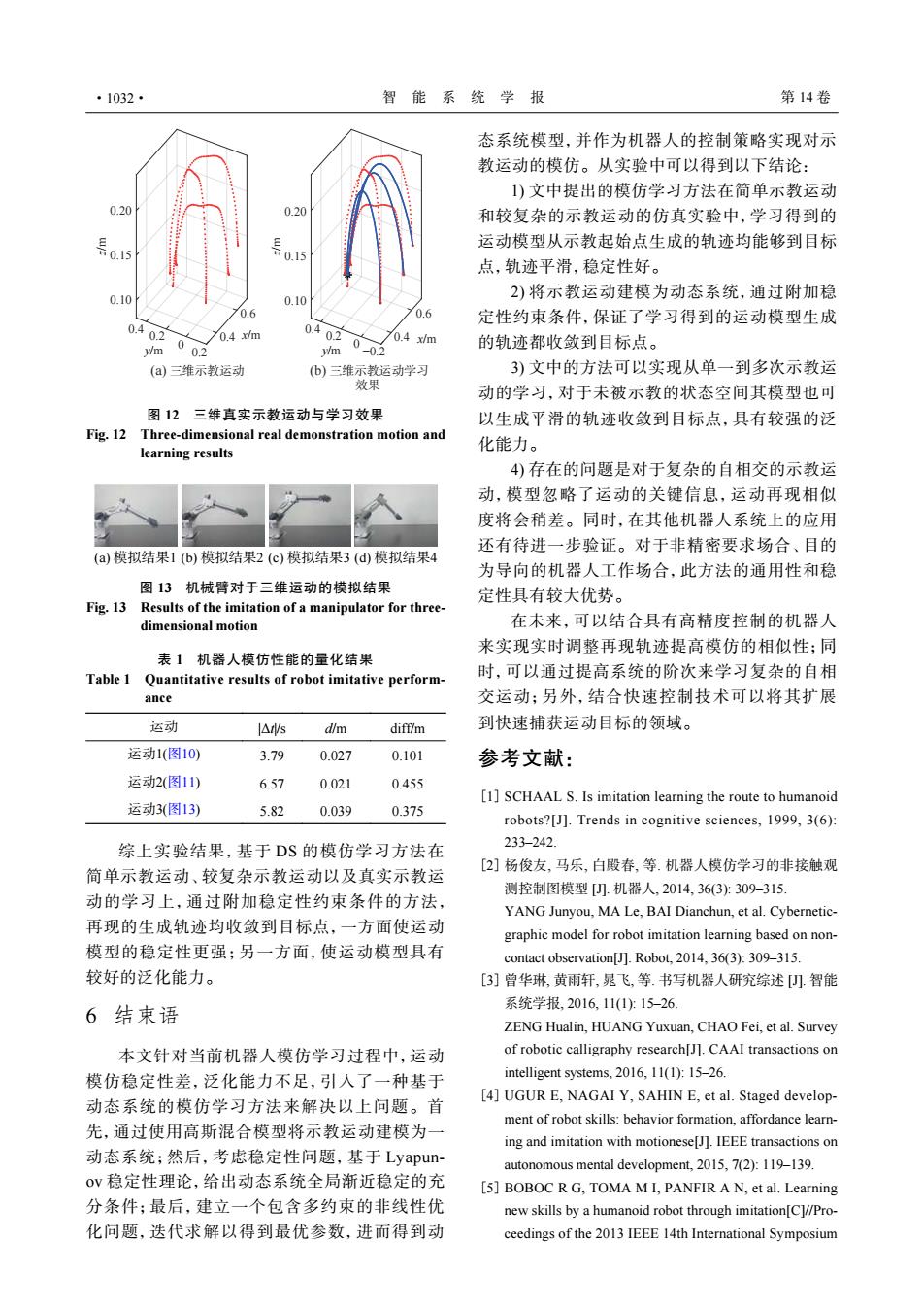
·1032· 智能系统学报 第14卷 态系统模型,并作为机器人的控制策略实现对示 教运动的模仿。从实验中可以得到以下结论: 1)文中提出的模仿学习方法在简单示教运动 0.20 0.20 和较复杂的示教运动的仿真实验中,学习得到的 运动模型从示教起始点生成的轨迹均能够到目标 0.1 i0.15 点,轨迹平滑,稳定性好。 2)将示教运动建模为动态系统,通过附加稳 010 0.10 0.6 0.6 定性约束条件,保证了学习得到的运动模型生成 0.402 002 0.4xm 0.402 0.4x/m y/m m 00.2 的轨迹都收敛到目标点。 (a)三维示教运动 (b)三维示教运动学习 3)文中的方法可以实现从单一到多次示教运 效果 动的学习,对于未被示教的状态空间其模型也可 图12三维真实示教运动与学习效果 以生成平滑的轨迹收敛到目标点,具有较强的泛 Fig.12 Three-dimensional real demonstration motion and learning results 化能力。 4)存在的问题是对于复杂的自相交的示教运 动,模型忽略了运动的关键信息,运动再现相似 度将会稍差。同时,在其他机器人系统上的应用 还有待进一步验证。对于非精密要求场合、目的 (a)模拟结果1(b)模拟结果2(c)模拟结果3(d)模拟结果4 为导向的机器人工作场合,此方法的通用性和稳 图13机械臂对于三维运动的模拟结果 定性具有较大优势。 Fig.13 Results of the imitation of a manipulator for three- dimensional motion 在未来,可以结合具有高精度控制的机器人 来实现实时调整再现轨迹提高模仿的相似性;同 表1机器人模仿性能的量化结果 Table 1 Quantitative results of robot imitative perform- 时,可以通过提高系统的阶次来学习复杂的自相 ance 交运动;另外,结合快速控制技术可以将其扩展 运动 I△Ws d/m diff/m 到快速捕获运动目标的领域。 运动1(图10) 3.79 0.027 0.101 参考文献: 运动2(图11) 6.57 0.021 0.455 [1]SCHAAL S.Is imitation learning the route to humanoid 运动3(图13) 5.82 0.039 0.375 robots?[J].Trends in cognitive sciences,1999,3(6): 综上实验结果,基于DS的模仿学习方法在 233-242. 简单示教运动、较复杂示教运动以及真实示教运 [2]杨俊友,马乐,白殿春,等.机器人模仿学习的非接触观 测控制图模型).机器人,2014,36(3):309-315. 动的学习上,通过附加稳定性约束条件的方法, YANG Junyou,MA Le,BAI Dianchun,et al.Cybernetic- 再现的生成轨迹均收敛到目标点,一方面使运动 graphic model for robot imitation learning based on non- 模型的稳定性更强;另一方面,使运动模型具有 contact observation[J].Robot,2014,36(3):309-315. 较好的泛化能力。 [3】]曾华琳,黄雨轩,晁飞,等.书写机器人研究综述).智能 6结束语 系统学报,2016,11(1):15-26. ZENG Hualin,HUANG Yuxuan,CHAO Fei,et al.Survey 本文针对当前机器人模仿学习过程中,运动 of robotic calligraphy research[J].CAAI transactions on 模仿稳定性差,泛化能力不足,引入了一种基于 intelligent systems,2016,11(1):15-26. 动态系统的模仿学习方法来解决以上问题。首 [4]UGUR E,NAGAI Y,SAHIN E,et al.Staged develop- ment of robot skills:behavior formation,affordance learn- 先,通过使用高斯混合模型将示教运动建模为一 ing and imitation with motionese[].IEEE transactions on 动态系统;然后,考虑稳定性问题,基于Lyapun- autonomous mental development,2015,7(2):119-139. Oⅴ稳定性理论,给出动态系统全局渐近稳定的充 [5]BOBOC R G.TOMA MI,PANFIR A N,et al.Learning 分条件;最后,建立一个包含多约束的非线性优 new skills by a humanoid robot through imitation[C]//Pro- 化问题,迭代求解以得到最优参数,进而得到动 ceedings of the 2013 IEEE 14th International Symposium0.6 0.10 x/m 0.15 z/m 0.4 0.20 y/m 0.2 0.4 0 −0.2 (a) 三维示教运动 (b) 三维示教运动学习 效果 0.6 0.10 x/m 0.15 z/m 0.4 0.20 y/m 0.2 0.4 0 −0.2 图 12 三维真实示教运动与学习效果 Fig. 12 Three-dimensional real demonstration motion and learning results (a) 模拟结果1 (b) 模拟结果2 (c) 模拟结果3 (d) 模拟结果4 图 13 机械臂对于三维运动的模拟结果 Fig. 13 Results of the imitation of a manipulator for threedimensional motion 表 1 机器人模仿性能的量化结果 Table 1 Quantitative results of robot imitative performance 运动 |Δt|/s d/m diff/m 运动1(图10) 3.79 0.027 0.101 运动2(图11) 6.57 0.021 0.455 运动3(图13) 5.82 0.039 0.375 综上实验结果,基于 DS 的模仿学习方法在 简单示教运动、较复杂示教运动以及真实示教运 动的学习上,通过附加稳定性约束条件的方法, 再现的生成轨迹均收敛到目标点,一方面使运动 模型的稳定性更强;另一方面,使运动模型具有 较好的泛化能力。 6 结束语 本文针对当前机器人模仿学习过程中,运动 模仿稳定性差,泛化能力不足,引入了一种基于 动态系统的模仿学习方法来解决以上问题。首 先,通过使用高斯混合模型将示教运动建模为一 动态系统;然后,考虑稳定性问题,基于 Lyapunov 稳定性理论,给出动态系统全局渐近稳定的充 分条件;最后,建立一个包含多约束的非线性优 化问题,迭代求解以得到最优参数,进而得到动 态系统模型,并作为机器人的控制策略实现对示 教运动的模仿。从实验中可以得到以下结论: 1) 文中提出的模仿学习方法在简单示教运动 和较复杂的示教运动的仿真实验中,学习得到的 运动模型从示教起始点生成的轨迹均能够到目标 点,轨迹平滑,稳定性好。 2) 将示教运动建模为动态系统,通过附加稳 定性约束条件,保证了学习得到的运动模型生成 的轨迹都收敛到目标点。 3) 文中的方法可以实现从单一到多次示教运 动的学习,对于未被示教的状态空间其模型也可 以生成平滑的轨迹收敛到目标点,具有较强的泛 化能力。 4) 存在的问题是对于复杂的自相交的示教运 动,模型忽略了运动的关键信息,运动再现相似 度将会稍差。同时,在其他机器人系统上的应用 还有待进一步验证。对于非精密要求场合、目的 为导向的机器人工作场合,此方法的通用性和稳 定性具有较大优势。 在未来,可以结合具有高精度控制的机器人 来实现实时调整再现轨迹提高模仿的相似性;同 时,可以通过提高系统的阶次来学习复杂的自相 交运动;另外,结合快速控制技术可以将其扩展 到快速捕获运动目标的领域。 参考文献: SCHAAL S. Is imitation learning the route to humanoid robots?[J]. Trends in cognitive sciences, 1999, 3(6): 233–242. [1] 杨俊友, 马乐, 白殿春, 等. 机器人模仿学习的非接触观 测控制图模型 [J]. 机器人, 2014, 36(3): 309–315. YANG Junyou, MA Le, BAI Dianchun, et al. Cyberneticgraphic model for robot imitation learning based on noncontact observation[J]. Robot, 2014, 36(3): 309–315. [2] 曾华琳, 黄雨轩, 晁飞, 等. 书写机器人研究综述 [J]. 智能 系统学报, 2016, 11(1): 15–26. ZENG Hualin, HUANG Yuxuan, CHAO Fei, et al. Survey of robotic calligraphy research[J]. CAAI transactions on intelligent systems, 2016, 11(1): 15–26. [3] UGUR E, NAGAI Y, SAHIN E, et al. Staged development of robot skills: behavior formation, affordance learning and imitation with motionese[J]. IEEE transactions on autonomous mental development, 2015, 7(2): 119–139. [4] BOBOC R G, TOMA M I, PANFIR A N, et al. Learning new skills by a humanoid robot through imitation[C]//Proceedings of the 2013 IEEE 14th International Symposium [5] ·1032· 智 能 系 统 学 报 第 14 卷