正在加载图片...
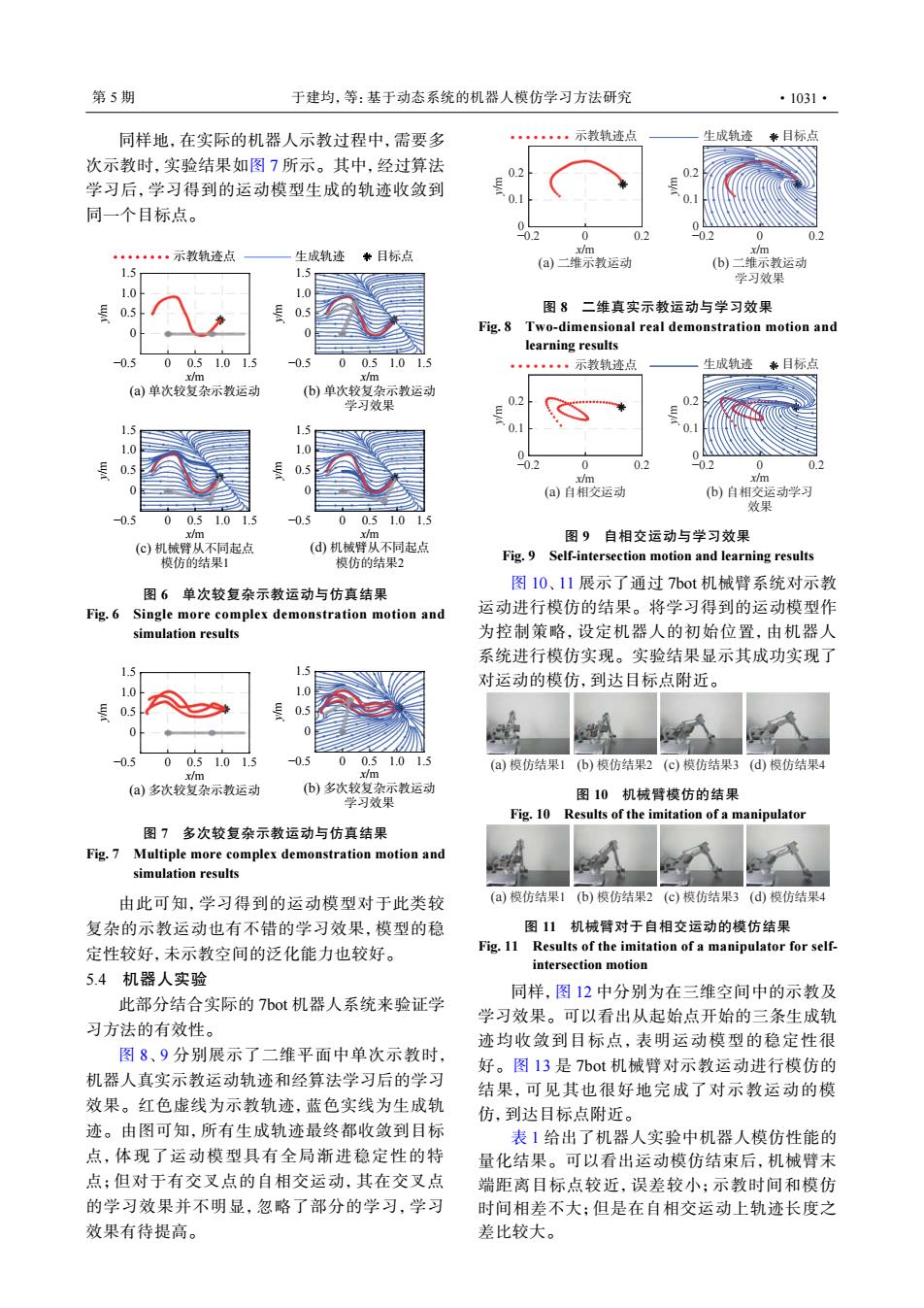
第5期 于建均,等:基于动态系统的机器人模仿学习方法研究 ·1031· 同样地,在实际的机器人示教过程中,需要多 ····。·。。示教轨迹点 生成轨迹米目标点 次示教时,实验结果如图7所示。其中,经过算法 02 02 学习后,学习得到的运动模型生成的轨迹收敛到 0.1 0 同一个目标点。 0 0.2 0 0.2 -0.2 0 0.2 ········示教轨迹点 ,生成轨迹*目标点 m x/m (a)二维示教运动 (b)二维示教运动 1.5 1.5 学习效果 1.0 0.5 0.5 图8二维真实示教运动与学习效果 Fig.8 Two-dimensional real demonstration motion and learning results 0.5 00.51.01.5 0.5 0 0.51.01.5 ······。·示教轨迹点 生成轨迹 *目标点 x/m x/m (a)单次较复杂示教运动 (b)单次较复杂示教运动 学习效果 0.2 1.5 1.5 0.1 1.0 -0.2 0 0.2 -0.2 0 0.2 x/m x/m (a)自相交运动 (b)自相交运动学习 效果 05 00.51.01.5 -0.5 00.51.0 x/m x/m 图9自相交运动与学习效果 (©)机械臂从不同起点 (d)机械臂从不同起点 模仿的结果1 模仿的结果2 Fig.9 Self-intersection motion and learning results 图10、11展示了通过7bot机械臂系统对示教 图6单次较复杂示教运动与仿真结果 Fig.6 Single more complex demonstration motion and 运动进行模仿的结果。将学习得到的运动模型作 simulation results 为控制策略,设定机器人的初始位置,由机器人 系统进行模仿实现。实验结果显示其成功实现了 1.5 1.5 对运动的模仿,到达目标点附近。 1.0 1.0 0.5 0.5 -0.5 00.51.01.5 -0.5 0 0.5 1.01.5 (a)模仿结果1(b)模仿结果2(c)模仿结果3(d模仿结果4 x/m x/m (a)多次较复杂示教运动 (b)多次较复杂示教运动 图10机械臂模仿的结果 学习效果 Fig.10 Results of the imitation of a manipulator 图7多次较复杂示教运动与仿真结果 Fig.7 Multiple more complex demonstration motion and simulation results 由此可知,学习得到的运动模型对于此类较 (a)模仿结果1(b)模仿结果2 (c)模仿结果3(d模仿结果4 复杂的示教运动也有不错的学习效果,模型的稳 图11机械臂对于自相交运动的模仿结果 定性较好,未示教空间的泛化能力也较好。 Fig.11 Results of the imitation of a manipulator for self intersection motion 5.4机器人实验 同样,图12中分别为在三维空间中的示教及 此部分结合实际的7bot机器人系统来验证学 学习效果。可以看出从起始点开始的三条生成轨 习方法的有效性。 迹均收敛到目标点,表明运动模型的稳定性很 图8、9分别展示了二维平面中单次示教时, 好。图13是7bot机械臂对示教运动进行模仿的 机器人真实示教运动轨迹和经算法学习后的学习 结果,可见其也很好地完成了对示教运动的模 效果。红色虚线为示教轨迹,蓝色实线为生成轨 仿,到达目标点附近。 迹。由图可知,所有生成轨迹最终都收敛到目标 表1给出了机器人实验中机器人模仿性能的 点,体现了运动模型具有全局渐进稳定性的特 量化结果。可以看出运动模仿结束后,机械臂末 点;但对于有交叉点的自相交运动,其在交叉点 端距离目标点较近,误差较小;示教时间和模仿 的学习效果并不明显,忽略了部分的学习,学习 时间相差不大;但是在自相交运动上轨迹长度之 效果有待提高。 差比较大。同样地,在实际的机器人示教过程中,需要多 次示教时,实验结果如图 7 所示。其中,经过算法 学习后,学习得到的运动模型生成的轨迹收敛到 同一个目标点。 示教轨迹点 生成轨迹 目标点 −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m (a) 单次较复杂示教运动 (b) 单次较复杂示教运动 学习效果 −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m (c) 机械臂从不同起点 模仿的结果1 (d) 机械臂从不同起点 模仿的结果2 图 6 单次较复杂示教运动与仿真结果 Fig. 6 Single more complex demonstration motion and simulation results −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m −0.5 0 0.5 1.0 1.5 x/m 0 0.5 1.0 1.5 y/m (b) 多次较复杂示教运动 学习效果 (a) 多次较复杂示教运动 图 7 多次较复杂示教运动与仿真结果 Fig. 7 Multiple more complex demonstration motion and simulation results 由此可知,学习得到的运动模型对于此类较 复杂的示教运动也有不错的学习效果,模型的稳 定性较好,未示教空间的泛化能力也较好。 5.4 机器人实验 此部分结合实际的 7bot 机器人系统来验证学 习方法的有效性。 图 8、9 分别展示了二维平面中单次示教时, 机器人真实示教运动轨迹和经算法学习后的学习 效果。红色虚线为示教轨迹,蓝色实线为生成轨 迹。由图可知,所有生成轨迹最终都收敛到目标 点,体现了运动模型具有全局渐进稳定性的特 点;但对于有交叉点的自相交运动,其在交叉点 的学习效果并不明显,忽略了部分的学习,学习 效果有待提高。 示教轨迹点 生成轨迹 目标点 −0.2 0 0.2 x/m 0 0.1 0.2 y/m −0.2 0 0.2 x/m 0 0.1 0.2 y/m (b) 二维示教运动 学习效果 (a) 二维示教运动 图 8 二维真实示教运动与学习效果 Fig. 8 Two-dimensional real demonstration motion and learning results 示教轨迹点 生成轨迹 目标点 −0.2 0 0.2 x/m 0 0.1 0.2 y/m −0.2 0 0.2 x/m 0 0.1 0.2 y/m (b) 自相交运动学习 效果 (a) 自相交运动 图 9 自相交运动与学习效果 Fig. 9 Self-intersection motion and learning results 图 10、11 展示了通过 7bot 机械臂系统对示教 运动进行模仿的结果。将学习得到的运动模型作 为控制策略,设定机器人的初始位置,由机器人 系统进行模仿实现。实验结果显示其成功实现了 对运动的模仿,到达目标点附近。 (a) 模仿结果1 (b) 模仿结果2 (c) 模仿结果3 (d) 模仿结果4 图 10 机械臂模仿的结果 Fig. 10 Results of the imitation of a manipulator (a) 模仿结果1 (b) 模仿结果2 (c) 模仿结果3 (d) 模仿结果4 图 11 机械臂对于自相交运动的模仿结果 Fig. 11 Results of the imitation of a manipulator for selfintersection motion 同样,图 12 中分别为在三维空间中的示教及 学习效果。可以看出从起始点开始的三条生成轨 迹均收敛到目标点,表明运动模型的稳定性很 好。图 13 是 7bot 机械臂对示教运动进行模仿的 结果,可见其也很好地完成了对示教运动的模 仿,到达目标点附近。 表 1 给出了机器人实验中机器人模仿性能的 量化结果。可以看出运动模仿结束后,机械臂末 端距离目标点较近,误差较小;示教时间和模仿 时间相差不大;但是在自相交运动上轨迹长度之 差比较大。 第 5 期 于建均,等:基于动态系统的机器人模仿学习方法研究 ·1031·