正在加载图片...
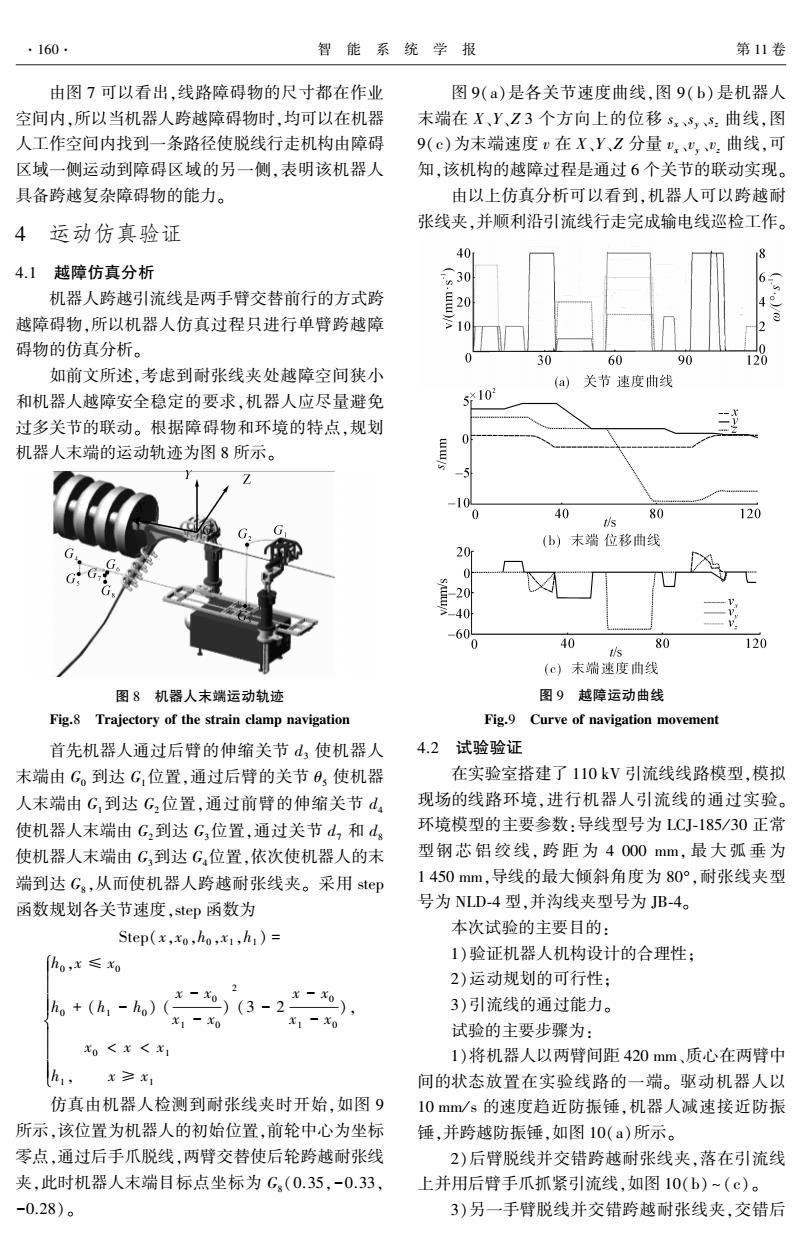
·160 智能系统学报 第11卷 由图7可以看出,线路障碍物的尺寸都在作业 图9(a)是各关节速度曲线,图9(b)是机器人 空间内,所以当机器人跨越障碍物时,均可以在机器 末端在X、Y、Z3个方向上的位移sS,曲线,图 人工作空间内找到一条路径使脱线行走机构由障碍 9(c)为未端速度u在XY、Z分量心,.曲线,可 区域一侧运动到障碍区域的另一侧,表明该机器人 知,该机构的越障过程是通过6个关节的联动实现。 具备跨越复杂障碍物的能力。 由以上仿真分析可以看到,机器人可以跨越耐 4运动仿真验证 张线夹,并顺利沿引流线行走完成输电线巡检工作。 40 4.1越障仿真分析 机器人跨越引流线是两手臂交替前行的方式跨 20 越障碍物,所以机器人仿真过程只进行单臂跨越障 10 碍物的仿真分析。 30 60 90 120 如前文所述,考虑到耐张线夹处越障空间狭小 (a)关节速度曲线 和机器人越障安全稳定的要求,机器人应尽量避免 ×10 过多关节的联动。根据障碍物和环境的特点,规划 机器人末端的运动轨迹为图8所示。 ww/s -10 0 40 80 120 ()末端位移曲线 20 -20 号40 三 60 40 80 120 (c)末端速度曲线 图8机器人末端运动轨迹 图9越障运动曲线 Fig.8 Trajectory of the strain clamp navigation Fig.9 Curve of navigation movement 首先机器人通过后臂的伸缩关节d,使机器人 4.2试验验证 末端由G。到达G,位置,通过后臂的关节0,使机器 在实验室搭建了110kV引流线线路模型,模拟 人末端由G,到达G,位置,通过前臂的伸缩关节d, 现场的线路环境,进行机器人引流线的通过实验。 使机器人末端由G,到达G位置,通过关节d,和d 环境模型的主要参数:导线型号为LCJ-185/30正常 使机器人末端由G,到达G,位置,依次使机器人的末 型钢芯铝绞线,跨距为4000mm,最大弧垂为 端到达Gs,从而使机器人跨越耐张线夹。采用step 1450mm,导线的最大倾斜角度为80°,耐张线夹型 函数规划各关节速度,step函数为 号为NLD-4型,并沟线夹型号为JB-4。 本次试验的主要目的: Step(x,xo,ho,x1,h1)= 1)验证机器人机构设计的合理性; ho,x≤xo 2)运动规划的可行性; 2 h,+(h,-)(-)(3-2二0). 3)引流线的通过能力。 x1-x0 x1-X0 试验的主要步骤为: Xo x <X1 1)将机器人以两臂间距420mm、质心在两臂中 h1,x≥x1 间的状态放置在实验线路的一端。驱动机器人以 仿真由机器人检测到耐张线夹时开始,如图9 10mm/s的速度趋近防振锤,机器人减速接近防振 所示,该位置为机器人的初始位置,前轮中心为坐标 锤,并跨越防振锤,如图10(a)所示。 零点,通过后手爪脱线,两臂交替使后轮跨越耐张线 2)后臂脱线并交错跨越耐张线夹,落在引流线 夹,此时机器人末端目标点坐标为Gs(0.35,-0.33, 上并用后臂手爪抓紧引流线,如图10(b)~(©)。 -0.28)。 3)另一手臂脱线并交错跨越耐张线夹,交错后由图 7 可以看出,线路障碍物的尺寸都在作业 空间内,所以当机器人跨越障碍物时,均可以在机器 人工作空间内找到一条路径使脱线行走机构由障碍 区域一侧运动到障碍区域的另一侧,表明该机器人 具备跨越复杂障碍物的能力。 4 运动仿真验证 4.1 越障仿真分析 机器人跨越引流线是两手臂交替前行的方式跨 越障碍物,所以机器人仿真过程只进行单臂跨越障 碍物的仿真分析。 如前文所述,考虑到耐张线夹处越障空间狭小 和机器人越障安全稳定的要求,机器人应尽量避免 过多关节的联动。 根据障碍物和环境的特点,规划 机器人末端的运动轨迹为图 8 所示。 图 8 机器人末端运动轨迹 Fig.8 Trajectory of the strain clamp navigation 首先机器人通过后臂的伸缩关节 d3 使机器人 末端由 G0 到达 G1位置,通过后臂的关节 θ5 使机器 人末端由 G1到达 G2位置,通过前臂的伸缩关节 d4 使机器人末端由 G2到达 G3位置,通过关节 d7 和 d8 使机器人末端由 G3到达 G4位置,依次使机器人的末 端到达 G8 ,从而使机器人跨越耐张线夹。 采用 step 函数规划各关节速度,step 函数为 Step(x,x0 ,h0 ,x1 ,h1 ) = h0 ,x ≤ x0 h0 + (h1 - h0 ) ( x - x0 x1 - x0 ) 2 (3 - 2 x - x0 x1 - x0 ), x0 < x < x1 h1 , x ≥ x1 ì î í ï ï ïï ï ï ïï 仿真由机器人检测到耐张线夹时开始,如图 9 所示,该位置为机器人的初始位置,前轮中心为坐标 零点,通过后手爪脱线,两臂交替使后轮跨越耐张线 夹,此时机器人末端目标点坐标为 G8(0.35,-0.33, -0.28)。 图 9(a)是各关节速度曲线,图 9( b)是机器人 末端在 X、Y、Z 3 个方向上的位移 sx、sy、sz 曲线,图 9(c)为末端速度 v 在 X、Y、Z 分量 vx、vy、vz 曲线,可 知,该机构的越障过程是通过 6 个关节的联动实现。 由以上仿真分析可以看到,机器人可以跨越耐 张线夹,并顺利沿引流线行走完成输电线巡检工作。 图 9 越障运动曲线 Fig.9 Curve of navigation movement 4.2 试验验证 在实验室搭建了 110 kV 引流线线路模型,模拟 现场的线路环境,进行机器人引流线的通过实验。 环境模型的主要参数:导线型号为 LCJ⁃185 / 30 正常 型钢 芯 铝 绞 线, 跨 距 为 4 000 mm, 最 大 弧 垂 为 1 450 mm,导线的最大倾斜角度为 80°,耐张线夹型 号为 NLD⁃4 型,并沟线夹型号为 JB⁃4。 本次试验的主要目的: 1)验证机器人机构设计的合理性; 2)运动规划的可行性; 3)引流线的通过能力。 试验的主要步骤为: 1)将机器人以两臂间距 420 mm、质心在两臂中 间的状态放置在实验线路的一端。 驱动机器人以 10 mm / s 的速度趋近防振锤,机器人减速接近防振 锤,并跨越防振锤,如图 10(a)所示。 2)后臂脱线并交错跨越耐张线夹,落在引流线 上并用后臂手爪抓紧引流线,如图 10(b) ~ (c)。 3)另一手臂脱线并交错跨越耐张线夹,交错后 ·160· 智 能 系 统 学 报 第 11 卷