正在加载图片...
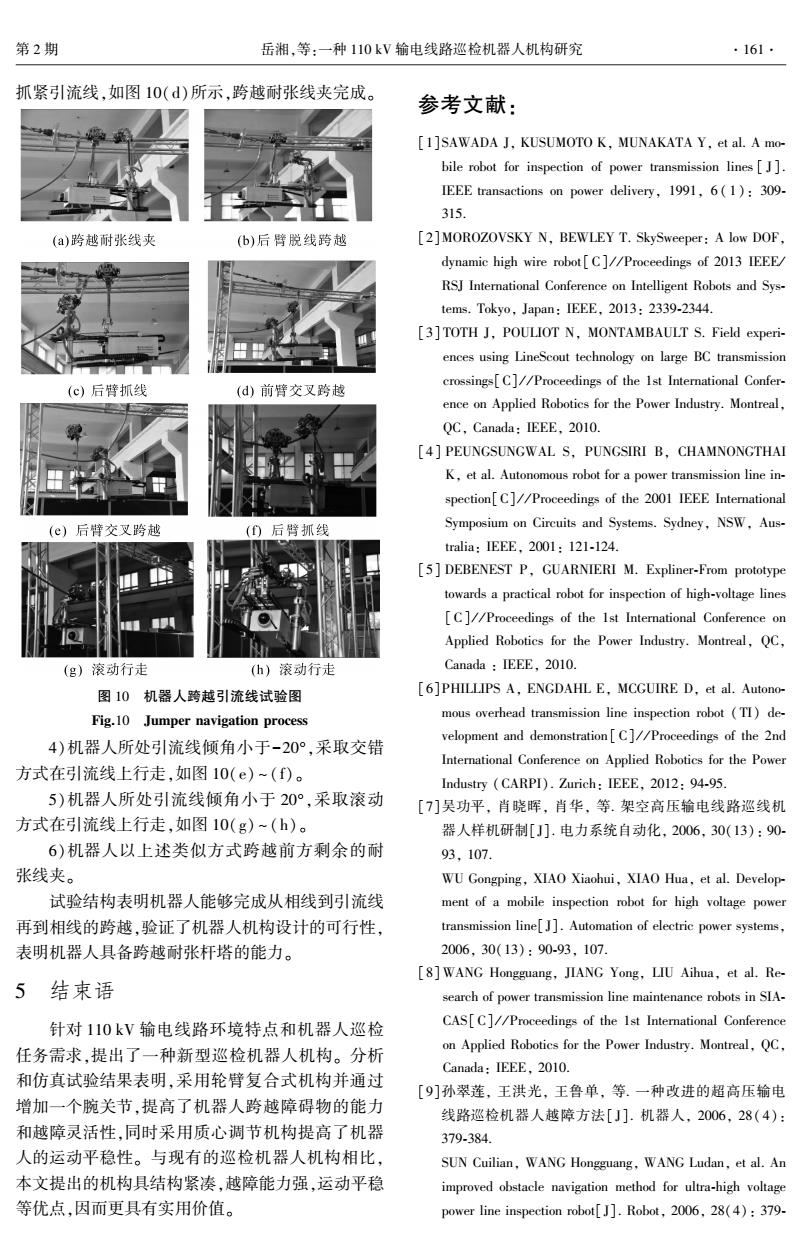
第2期 岳湘,等:一种110kV输电线路巡检机器人机构研究 ·161· 抓紧引流线,如图10(d)所示,跨越耐张线夹完成。 参考文献: [1]SAWADA J,KUSUMOTO K,MUNAKATA Y,et al.A mo- bile robot for inspection of power transmission lines[J]. IEEE transactions on power delivery,1991,6(1):309- 315. (a)跨越耐张线夹 (b)后臂脱线跨越 [2]MOROZOVSKY N,BEWLEY T.SkySweeper:A low DOF, dynamic high wire robot[C]//Proceedings of 2013 IEEE RSJ International Conference on Intelligent Robots and Sys- tems.Tokyo,Japan:IEEE,2013:2339-2344. [3]TOTH J,POULIOT N,MONTAMBAULT S.Field experi- ences using LineScout technology on large BC transmission (c)后臂抓线 (d)前臂交叉跨越 crossings[C]//Proceedings of the 1st International Confer- ence on Applied Robotics for the Power Industry.Montreal, OC,Canada:IEEE,2010. [4]PEUNGSUNGWAL S,PUNGSIRI B,CHAMNONGTHAI K,et al.Autonomous robot for a power transmission line in- spection[C]//Proceedings of the 2001 IEEE International (e)后臂交叉跨越 ()后臂抓线 Symposium on Circuits and Systems.Sydney,NSW,Aus- tralia:EEE,2001:121-124. [5]DEBENEST P,GUARNIERI M.Expliner-From prototype towards a practical robot for inspection of high-voltage lines [C]//Proceedings of the 1st International Conference on Applied Robotics for the Power Industry.Montreal,QC, (g)滚动行走 (h)滚动行走 Canada IEEE,2010. 图10机器人跨越引流线试验图 [6]PHILLIPS A,ENGDAHL E,MCGUIRE D,et al.Autono- Fig.10 Jumper navigation process mous overhead transmission line inspection robot (TI)de- velopment and demonstration[C]//Proceedings of the 2nd 4)机器人所处引流线倾角小于-20°,采取交错 International Conference on Applied Robotics for the Power 方式在引流线上行走,如图10(e)~(f)。 Industry (CARPI).Zurich:IEEE,2012:94-95. 5)机器人所处引流线倾角小于20°,采取滚动 [7]吴功平,肖晓晖,肖华,等.架空高压输电线路巡线机 方式在引流线上行走,如图10(g)~(h)。 器人样机研制[J].电力系统自动化,2006,30(13):90- 6)机器人以上述类似方式跨越前方剩余的耐 93,107. 张线夹。 WU Gongping,XIAO Xiaohui,XIAO Hua,et al.Develop- 试验结构表明机器人能够完成从相线到引流线 ment of a mobile inspection robot for high voltage power 再到相线的跨越,验证了机器人机构设计的可行性, transmission line[J].Automation of electric power systems, 表明机器人具备跨越耐张杆塔的能力。 2006,30(13):90-93,107. [8]WANG Hongguang,JIANG Yong,LIU Aihua,et al.Re- 5结束语 search of power transmission line maintenance robots in SIA- 针对110kV输电线路环境特点和机器人巡检 CAS[C]//Proceedings of the 1st International Conference 任务需求,提出了一种新型巡检机器人机构。分析 on Applied Robotics for the Power Industry.Montreal,QC, Canada:IEEE,2010. 和仿真试验结果表明,采用轮臂复合式机构并通过 [9]孙翠莲,王洪光,王鲁单,等.一种改进的超高压输电 增加一个腕关节,提高了机器人跨越障碍物的能力 线路巡检机器人越障方法[J].机器人,2006,28(4): 和越障灵活性,同时采用质心调节机构提高了机器 379-384. 人的运动平稳性。与现有的巡检机器人机构相比, SUN Cuilian,WANG Hongguang,WANG Ludan,et al.An 本文提出的机构具结构紧凑,越障能力强,运动平稳 improved obstacle navigation method for ultra-high voltage 等优点,因而更具有实用价值。 power line inspection robot[J].Robot,2006,28(4):379-抓紧引流线,如图 10(d)所示,跨越耐张线夹完成。 图 10 机器人跨越引流线试验图 Fig.10 Jumper navigation process 4)机器人所处引流线倾角小于-20°,采取交错 方式在引流线上行走,如图 10(e) ~ (f)。 5)机器人所处引流线倾角小于 20°,采取滚动 方式在引流线上行走,如图 10(g) ~ (h)。 6)机器人以上述类似方式跨越前方剩余的耐 张线夹。 试验结构表明机器人能够完成从相线到引流线 再到相线的跨越,验证了机器人机构设计的可行性, 表明机器人具备跨越耐张杆塔的能力。 5 结束语 针对 110 kV 输电线路环境特点和机器人巡检 任务需求,提出了一种新型巡检机器人机构。 分析 和仿真试验结果表明,采用轮臂复合式机构并通过 增加一个腕关节,提高了机器人跨越障碍物的能力 和越障灵活性,同时采用质心调节机构提高了机器 人的运动平稳性。 与现有的巡检机器人机构相比, 本文提出的机构具结构紧凑,越障能力强,运动平稳 等优点,因而更具有实用价值。 参考文献: [1]SAWADA J, KUSUMOTO K, MUNAKATA Y, et al. A mo⁃ bile robot for inspection of power transmission lines [ J]. IEEE transactions on power delivery, 1991, 6 ( 1): 309⁃ 315. [2]MOROZOVSKY N, BEWLEY T. SkySweeper: A low DOF, dynamic high wire robot[C] / / Proceedings of 2013 IEEE/ RSJ International Conference on Intelligent Robots and Sys⁃ tems. Tokyo, Japan: IEEE, 2013: 2339⁃2344. [3] TOTH J, POULIOT N, MONTAMBAULT S. Field experi⁃ ences using LineScout technology on large BC transmission crossings[C] / / Proceedings of the 1st International Confer⁃ ence on Applied Robotics for the Power Industry. Montreal, QC, Canada: IEEE, 2010. [4] PEUNGSUNGWAL S, PUNGSIRI B, CHAMNONGTHAI K, et al. Autonomous robot for a power transmission line in⁃ spection[C] / / Proceedings of the 2001 IEEE International Symposium on Circuits and Systems. Sydney, NSW, Aus⁃ tralia: IEEE, 2001: 121⁃124. [5] DEBENEST P, GUARNIERI M. Expliner⁃From prototype towards a practical robot for inspection of high⁃voltage lines [C] / / Proceedings of the 1st International Conference on Applied Robotics for the Power Industry. Montreal, QC, Canada : IEEE, 2010. [6]PHILLIPS A, ENGDAHL E, MCGUIRE D, et al. Autono⁃ mous overhead transmission line inspection robot ( TI) de⁃ velopment and demonstration[ C] / / Proceedings of the 2nd International Conference on Applied Robotics for the Power Industry (CARPI). Zurich: IEEE, 2012: 94⁃95. [7]吴功平, 肖晓晖, 肖华, 等. 架空高压输电线路巡线机 器人样机研制[J]. 电力系统自动化, 2006, 30(13): 90⁃ 93, 107. WU Gongping, XIAO Xiaohui, XIAO Hua, et al. Develop⁃ ment of a mobile inspection robot for high voltage power transmission line[J]. Automation of electric power systems, 2006, 30(13): 90⁃93, 107. [8] WANG Hongguang, JIANG Yong, LIU Aihua, et al. Re⁃ search of power transmission line maintenance robots in SIA⁃ CAS[C] / / Proceedings of the 1st International Conference on Applied Robotics for the Power Industry. Montreal, QC, Canada: IEEE, 2010. [9]孙翠莲, 王洪光, 王鲁单, 等. 一种改进的超高压输电 线路巡检机器人越障方法[ J]. 机器人, 2006, 28( 4): 379⁃384. SUN Cuilian, WANG Hongguang, WANG Ludan, et al. An improved obstacle navigation method for ultra⁃high voltage power line inspection robot[J]. Robot, 2006, 28(4): 379⁃ 第 2 期 岳湘,等:一种 110 kV 输电线路巡检机器人机构研究 ·161·