正在加载图片...
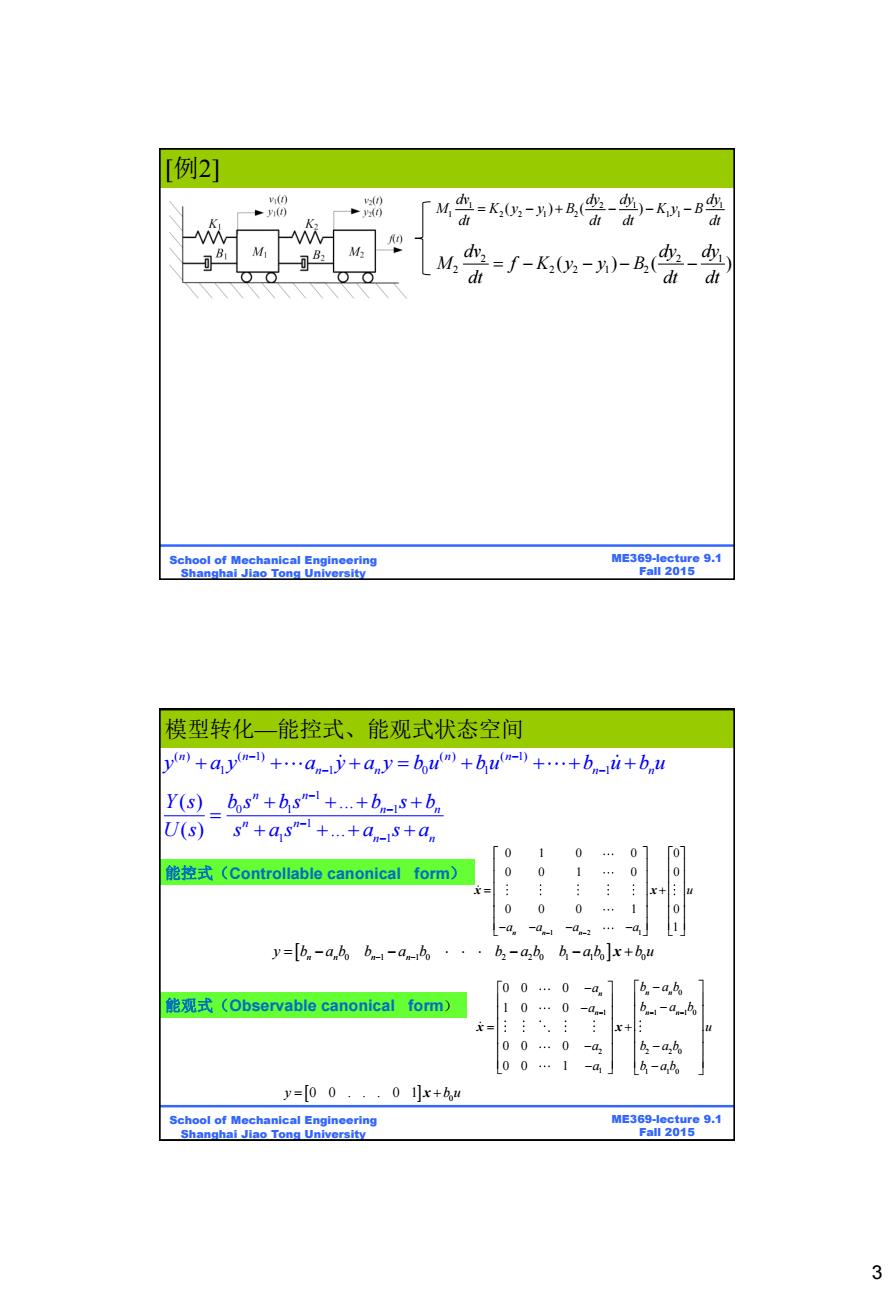
[例2] (0 「M血=K,0,-y+B,_)-Ky-B血 =f-K0-y)B,(座-$ M2 dt dt dt School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 模型转化一能控式、 能观式状态空间 ym+ay-l+…an-少+any=btm+b4im-l+…+bni+b,u Y(s) bs”+bs"-1++bn-1S+ba U(s) s"+as+.+ars+an 0 1 0 07 能控式(Controllable canonical form) 0 0 1… 0 x+ 0 0:0 0 0… -0。-01-an-2… -a, 1 y=[b-a,bo b-ambo ···b2-a2b b-abo]x+bou 「00… 0 -a. 能观式(Observable canonical form) 10 0 -an-l -a bo 龙= 1+ 00.… 0 -4 b,-a,bo 00…1 a L点-ab y=[00,..0]x+u School of Mechanical Engineering ME369-lecture 9.1 Shanghai Jiao Tong University Fall 2015 33 ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 2 2 1 2 2 2 1 2 ( ) ( ) dv dy dy M f K y y B dt dt dt 1 2 1 1 1 2 2 1 2 1 1 ( ) ( ) dv dy dy dy M K y y B K y B dt dt dt dt [例2] ME369-lecture 9.1 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 模型转化—能控式、能观式状态空间 ( ) ( 1) ( ) ( 1) 1 1 0 1 1 n n n n n n n n y a y a y a y b u b u b u b u 1 0 1 1 1 1 1 ( ) ... ( ) ... n n n n n n n n Y s b s b s b s b U s s a s a s a 1 2 1 0 1 0 0 0 0 0 1 0 0 0 0 0 1 0 1 n n n u a a a a x x y b a b b a b b a b b a b b u n n n n 0 1 1 0 2 2 0 1 1 0 0 x 0 1 1 1 0 2 2 2 0 1 1 1 0 0 0 0 1 0 0 0 0 0 0 0 1 n n n n n n a b a b a b a b u a b a b a b a b x x 0 y b u 0 0 . . . 0 1 x 能控式(Controllable canonical form) 能观式(Observable canonical form)