正在加载图片...
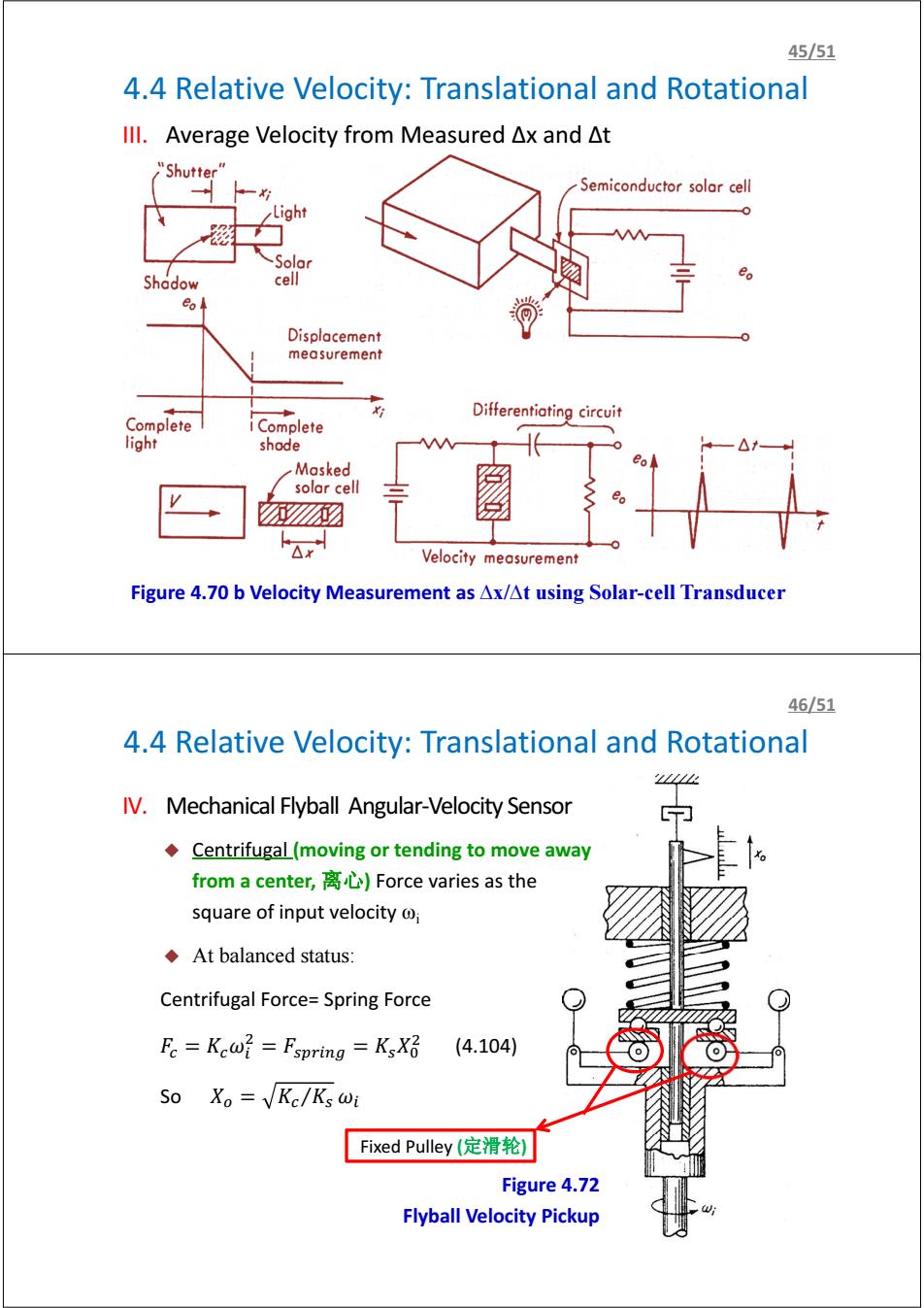
45/51 4.4 Relative Velocity:Translational and Rotational Ill.Average Velocity from Measured△xand△t "Shutter Semiconductor solar cell Light Solar Shadow cell Displacement measurement Differentiating circuit Complete i Complete light shode M Masked solar cell 配 Velocity measurement Figure 4.70 b Velocity Measurement as Ax/At using Solar-cell Transducer 46/51 4.4 Relative Velocity:Translational and Rotational IV.Mechanical Flyball Angular-Velocity Sensor T Centrifugal(moving or tending to move away from a center,,离心)Force varies as the square of input velocity o; ◆At balanced status: Centrifugal Force=Spring Force Ee=Kcω=Fspring=KX好 (4.104) S0X。=VKc/Kω Fixed Pulley(定滑轮) Figure 4.72 Flyball Velocity PickupIII. Average Velocity from Measured ∆x and ∆t Figure 4.70 b Velocity Measurement as ∆x/∆t using Solar-cell Transducer 4.4 Relative Velocity: Translational and Rotational 45/51 IV. Mechanical Flyball Angular-Velocity Sensor Centrifugal (moving or tending to move away from a center, 离心) Force varies as the square of input velocity ωi At balanced status: Centrifugal Force= Spring Force ߱ܭ = ܨ ଶ = ܨ௦ = ܭ௦ܺ ଶ (4.104) ߱ ௦ܭ⁄ܭ = ܺ So Figure 4.72 Flyball Velocity Pickup 4.4 Relative Velocity: Translational and Rotational Fixed Pulley (定滑轮) 46/51