正在加载图片...
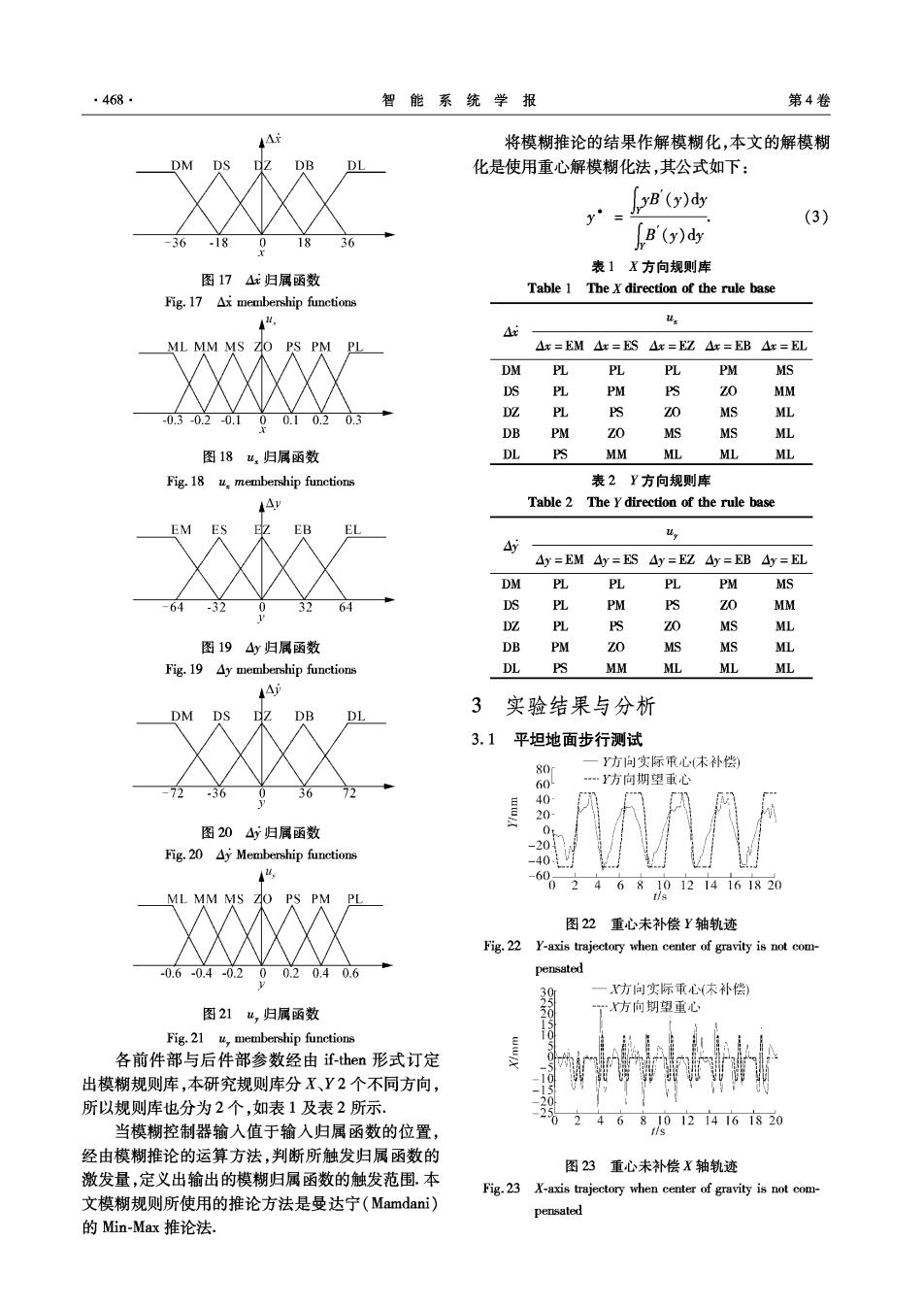
·468· 智能系统学报 第4卷 将模糊推论的结果作解模糊化,本文的解模糊 DM DS 化是使用重心解模糊化法,其公式如下: pB'(y)d (3) 36 -18 18 36 [B'(y)dy 表1X方向规则库 图17△x归属函数 Table 1 The X direction of the rule base Fig.17 Ax membership functions △ ML MM MS ZO PS PM PL △x=EM△x=ES△x=EZ△x=EB△x=EL DM PL PL PL PM MS DS PL PM PS Zo MM -0.3-0.2-0.100.10.20.3 DZ PL PS ZO MS ML DB PM ZO MS MS ML 图18私,归属函数 DL PS MM ML ML ML Fig.18 u.membership functions 表2Y方向规则库 14 Table 2 The Y direction of the rule base EM ES 4 Ay Ay=EM Ay=ES Ay=EZ Ay=EB Ay=EL DM PL PL PL PM MS 64 -32 0 32 DS PL PM PS Zo MM DZ PL PS ZO MS ML 图194y归属函数 DB PM Zo MS MS ML Fig.19 Ay membership functions DL PS MM ML ML ML DM DS DZ DB DL 3实验结果与分析 3.1平坦地面步行测试 了方向实际承心未补偿) 8 60 …Y方向期望重心 40 20 图204y归属函数 0 -20 Fig.20 Ay Membership functions 40明 -6 0 468101214161820 ML MM MS ZO PS PM PL 图22重心未补偿Y轴轨迹 Fig.22 Y-axis trajectory when center of gravity is not com- -0.6-0.4-0.200.20.40.6 pensated 30 一X方问实际重心(木补偿) 图214,归属函数 一X方向期望重心 20 Fig.21 membership functions 各前件部与后件部参数经由f-hen形式订定 出模糊规则库,本研究规则库分X、Y2个不同方向, 所以规则库也分为2个,如表1及表2所示. 当模糊控制器输入值于输入归属函数的位置, 2468,012416i820 经由模糊推论的运算方法,判断所触发归属函数的 图23重心未补偿X轴轨迹 激发量,定义出输出的模糊归属函数的触发范围。本 Fig.23 X-axis trajectory when center of gravity is not com- 文模糊规则所使用的推论方法是曼达宁(Mamdani) pensated 的Min-Max推论法