正在加载图片...
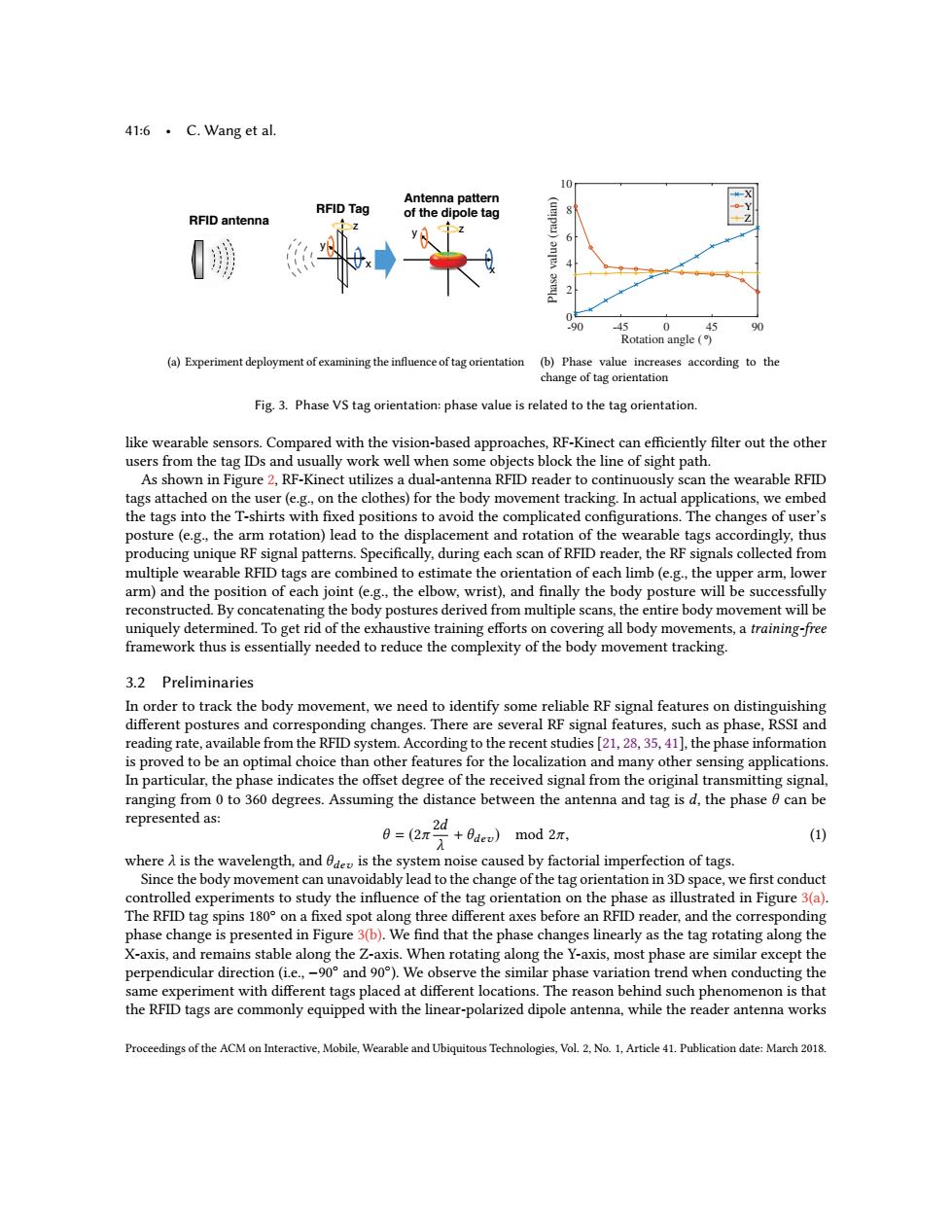
41:6·C.Wang et al. Antenna pattern X RFID Tag RFID antenna of the dipole tag 8 6 .90 45 0 45 90 Rotation angle ( (a)Experiment deployment of examining the influence of tag orientation (b)Phase value increases according to the change of tag orientation Fig.3.Phase VS tag orientation:phase value is related to the tag orientation. like wearable sensors.Compared with the vision-based approaches,RF-Kinect can efficiently filter out the other users from the tag IDs and usually work well when some objects block the line of sight path. As shown in Figure 2,RF-Kinect utilizes a dual-antenna RFID reader to continuously scan the wearable RFID tags attached on the user(e.g.,on the clothes)for the body movement tracking.In actual applications,we embed the tags into the T-shirts with fixed positions to avoid the complicated configurations.The changes of user's posture(e.g..the arm rotation)lead to the displacement and rotation of the wearable tags accordingly,thus producing unique RF signal patterns.Specifically,during each scan of RFID reader,the RF signals collected from multiple wearable RFID tags are combined to estimate the orientation of each limb(e.g.,the upper arm,lower arm)and the position of each joint(e.g.,the elbow,wrist),and finally the body posture will be successfully reconstructed.By concatenating the body postures derived from multiple scans,the entire body movement will be uniquely determined.To get rid of the exhaustive training efforts on covering all body movements,a training-free framework thus is essentially needed to reduce the complexity of the body movement tracking. 3.2 Preliminaries In order to track the body movement,we need to identify some reliable RF signal features on distinguishing different postures and corresponding changes.There are several RF signal features,such as phase,RSSI and reading rate,available from the RFID system.According to the recent studies [21,28,35,41],the phase information is proved to be an optimal choice than other features for the localization and many other sensing applications In particular,the phase indicates the offset degree of the received signal from the original transmitting signal, ranging from 0 to 360 degrees.Assuming the distance between the antenna and tag is d,the phase 0 can be represented as: 8=(2m24 +aeu)mod2m, (1) where A is the wavelength,and de is the system noise caused by factorial imperfection of tags. Since the body movement can unavoidably lead to the change of the tag orientation in 3D space,we first conduct controlled experiments to study the influence of the tag orientation on the phase as illustrated in Figure 3(a). The RFID tag spins 180 on a fixed spot along three different axes before an RFID reader,and the corresponding phase change is presented in Figure 3(b).We find that the phase changes linearly as the tag rotating along the X-axis,and remains stable along the Z-axis.When rotating along the Y-axis,most phase are similar except the perpendicular direction(i.e.,-90and 90).We observe the similar phase variation trend when conducting the same experiment with different tags placed at different locations.The reason behind such phenomenon is that the RFID tags are commonly equipped with the linear-polarized dipole antenna,while the reader antenna works Proceedings of the ACM on Interactive,Mobile,Wearable and Ubiquitous Technologies,Vol.2,No.1,Article 41.Publication date:March 2018.41:6 • C. Wang et al. RFID antenna RFID Tag x y z x y z Antenna pattern of the dipole tag (a) Experiment deployment of examining the influence of tag orientation Rotation angle (°) -90 -45 0 45 90 Phase value (radian) 0 2 4 6 8 10 X Y Z (b) Phase value increases according to the change of tag orientation Fig. 3. Phase VS tag orientation: phase value is related to the tag orientation. like wearable sensors. Compared with the vision-based approaches, RF-Kinect can efficiently filter out the other users from the tag IDs and usually work well when some objects block the line of sight path. As shown in Figure 2, RF-Kinect utilizes a dual-antenna RFID reader to continuously scan the wearable RFID tags attached on the user (e.g., on the clothes) for the body movement tracking. In actual applications, we embed the tags into the T-shirts with fixed positions to avoid the complicated configurations. The changes of user’s posture (e.g., the arm rotation) lead to the displacement and rotation of the wearable tags accordingly, thus producing unique RF signal patterns. Specifically, during each scan of RFID reader, the RF signals collected from multiple wearable RFID tags are combined to estimate the orientation of each limb (e.g., the upper arm, lower arm) and the position of each joint (e.g., the elbow, wrist), and finally the body posture will be successfully reconstructed. By concatenating the body postures derived from multiple scans, the entire body movement will be uniquely determined. To get rid of the exhaustive training efforts on covering all body movements, a training-free framework thus is essentially needed to reduce the complexity of the body movement tracking. 3.2 Preliminaries In order to track the body movement, we need to identify some reliable RF signal features on distinguishing different postures and corresponding changes. There are several RF signal features, such as phase, RSSI and reading rate, available from the RFID system. According to the recent studies [21, 28, 35, 41], the phase information is proved to be an optimal choice than other features for the localization and many other sensing applications. In particular, the phase indicates the offset degree of the received signal from the original transmitting signal, ranging from 0 to 360 degrees. Assuming the distance between the antenna and tag is d, the phase θ can be represented as: θ = (2π 2d λ + θdev ) mod 2π, (1) where λ is the wavelength, and θdev is the system noise caused by factorial imperfection of tags. Since the body movement can unavoidably lead to the change of the tag orientation in 3D space, we first conduct controlled experiments to study the influence of the tag orientation on the phase as illustrated in Figure 3(a). The RFID tag spins 180◦ on a fixed spot along three different axes before an RFID reader, and the corresponding phase change is presented in Figure 3(b). We find that the phase changes linearly as the tag rotating along the X-axis, and remains stable along the Z-axis. When rotating along the Y-axis, most phase are similar except the perpendicular direction (i.e., −90◦ and 90◦ ). We observe the similar phase variation trend when conducting the same experiment with different tags placed at different locations. The reason behind such phenomenon is that the RFID tags are commonly equipped with the linear-polarized dipole antenna, while the reader antenna works Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Vol. 2, No. 1, Article 41. Publication date: March 2018