正在加载图片...
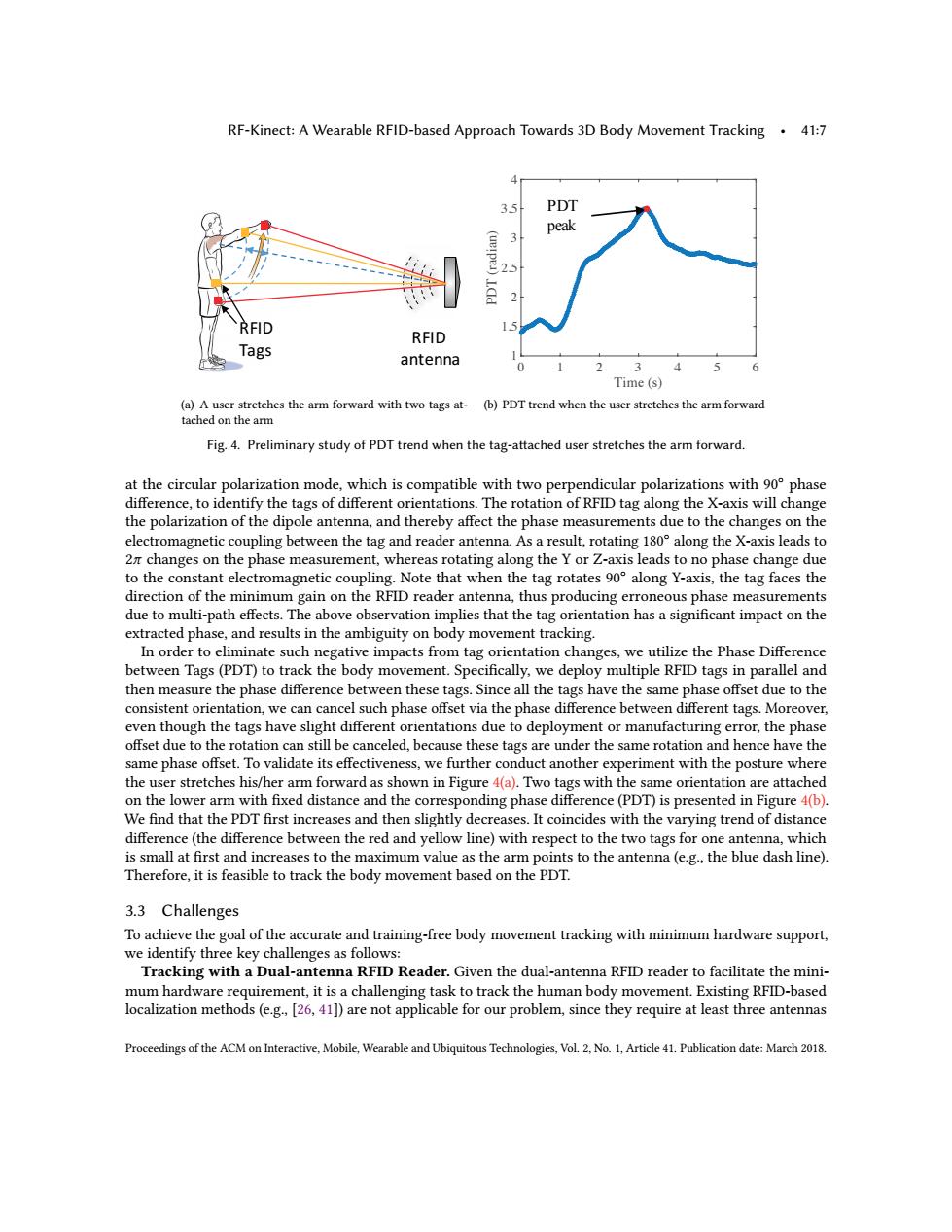
RF-Kinect:A Wearable RFID-based Approach Towards 3D Body Movement Tracking.41:7 3.5 PDT peak RFID RFID Tags antenna 2 3 4 5 6 Time(s) (a)A user stretches the arm forward with two tags at-(b)PDT trend when the user stretches the arm forward tached on the arm Fig.4.Preliminary study of PDT trend when the tag-attached user stretches the arm forward. at the circular polarization mode,which is compatible with two perpendicular polarizations with 90 phase difference,to identify the tags of different orientations.The rotation of RFID tag along the X-axis will change the polarization of the dipole antenna,and thereby affect the phase measurements due to the changes on the electromagnetic coupling between the tag and reader antenna.As a result,rotating 180 along the X-axis leads to 2m changes on the phase measurement,whereas rotating along the Y or Z-axis leads to no phase change due to the constant electromagnetic coupling.Note that when the tag rotates 90 along Y-axis,the tag faces the direction of the minimum gain on the RFID reader antenna,thus producing erroneous phase measurements due to multi-path effects.The above observation implies that the tag orientation has a significant impact on the extracted phase,and results in the ambiguity on body movement tracking. In order to eliminate such negative impacts from tag orientation changes,we utilize the Phase Difference between Tags(PDT)to track the body movement.Specifically,we deploy multiple RFID tags in parallel and then measure the phase difference between these tags.Since all the tags have the same phase offset due to the consistent orientation,we can cancel such phase offset via the phase difference between different tags.Moreover, even though the tags have slight different orientations due to deployment or manufacturing error,the phase offset due to the rotation can still be canceled,because these tags are under the same rotation and hence have the same phase offset.To validate its effectiveness,we further conduct another experiment with the posture where the user stretches his/her arm forward as shown in Figure 4(a).Two tags with the same orientation are attached on the lower arm with fixed distance and the corresponding phase difference(PDT)is presented in Figure 4(b). We find that the PDT first increases and then slightly decreases.It coincides with the varying trend of distance difference(the difference between the red and yellow line)with respect to the two tags for one antenna,which is small at first and increases to the maximum value as the arm points to the antenna(e.g.,the blue dash line). Therefore,it is feasible to track the body movement based on the PDT. 3.3 Challenges To achieve the goal of the accurate and training-free body movement tracking with minimum hardware support, we identify three key challenges as follows: Tracking with a Dual-antenna RFID Reader.Given the dual-antenna RFID reader to facilitate the mini- mum hardware requirement,it is a challenging task to track the human body movement.Existing RFID-based localization methods(e.g.,[26,41])are not applicable for our problem,since they require at least three antennas Proceedings of the ACM on Interactive,Mobile,Wearable and Ubiquitous Technologies,Vol.2,No.1,Article 41.Publication date:March 2018.RF-Kinect: A Wearable RFID-based Approach Towards 3D Body Movement Tracking • 41:7 !"#$ %&'(&&% !"#$ )%*+ (a) A user stretches the arm forward with two tags attached on the arm Time (s) 0 1 2 3 4 5 6 PDT (radian) 1 1.5 2 2.5 3 3.5 4 PDT peak (b) PDT trend when the user stretches the arm forward Fig. 4. Preliminary study of PDT trend when the tag-attached user stretches the arm forward. at the circular polarization mode, which is compatible with two perpendicular polarizations with 90◦ phase difference, to identify the tags of different orientations. The rotation of RFID tag along the X-axis will change the polarization of the dipole antenna, and thereby affect the phase measurements due to the changes on the electromagnetic coupling between the tag and reader antenna. As a result, rotating 180◦ along the X-axis leads to 2π changes on the phase measurement, whereas rotating along the Y or Z-axis leads to no phase change due to the constant electromagnetic coupling. Note that when the tag rotates 90◦ along Y-axis, the tag faces the direction of the minimum gain on the RFID reader antenna, thus producing erroneous phase measurements due to multi-path effects. The above observation implies that the tag orientation has a significant impact on the extracted phase, and results in the ambiguity on body movement tracking. In order to eliminate such negative impacts from tag orientation changes, we utilize the Phase Difference between Tags (PDT) to track the body movement. Specifically, we deploy multiple RFID tags in parallel and then measure the phase difference between these tags. Since all the tags have the same phase offset due to the consistent orientation, we can cancel such phase offset via the phase difference between different tags. Moreover, even though the tags have slight different orientations due to deployment or manufacturing error, the phase offset due to the rotation can still be canceled, because these tags are under the same rotation and hence have the same phase offset. To validate its effectiveness, we further conduct another experiment with the posture where the user stretches his/her arm forward as shown in Figure 4(a). Two tags with the same orientation are attached on the lower arm with fixed distance and the corresponding phase difference (PDT) is presented in Figure 4(b). We find that the PDT first increases and then slightly decreases. It coincides with the varying trend of distance difference (the difference between the red and yellow line) with respect to the two tags for one antenna, which is small at first and increases to the maximum value as the arm points to the antenna (e.g., the blue dash line). Therefore, it is feasible to track the body movement based on the PDT. 3.3 Challenges To achieve the goal of the accurate and training-free body movement tracking with minimum hardware support, we identify three key challenges as follows: Tracking with a Dual-antenna RFID Reader. Given the dual-antenna RFID reader to facilitate the minimum hardware requirement, it is a challenging task to track the human body movement. Existing RFID-based localization methods (e.g., [26, 41]) are not applicable for our problem, since they require at least three antennas Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Vol. 2, No. 1, Article 41. Publication date: March 2018