正在加载图片...
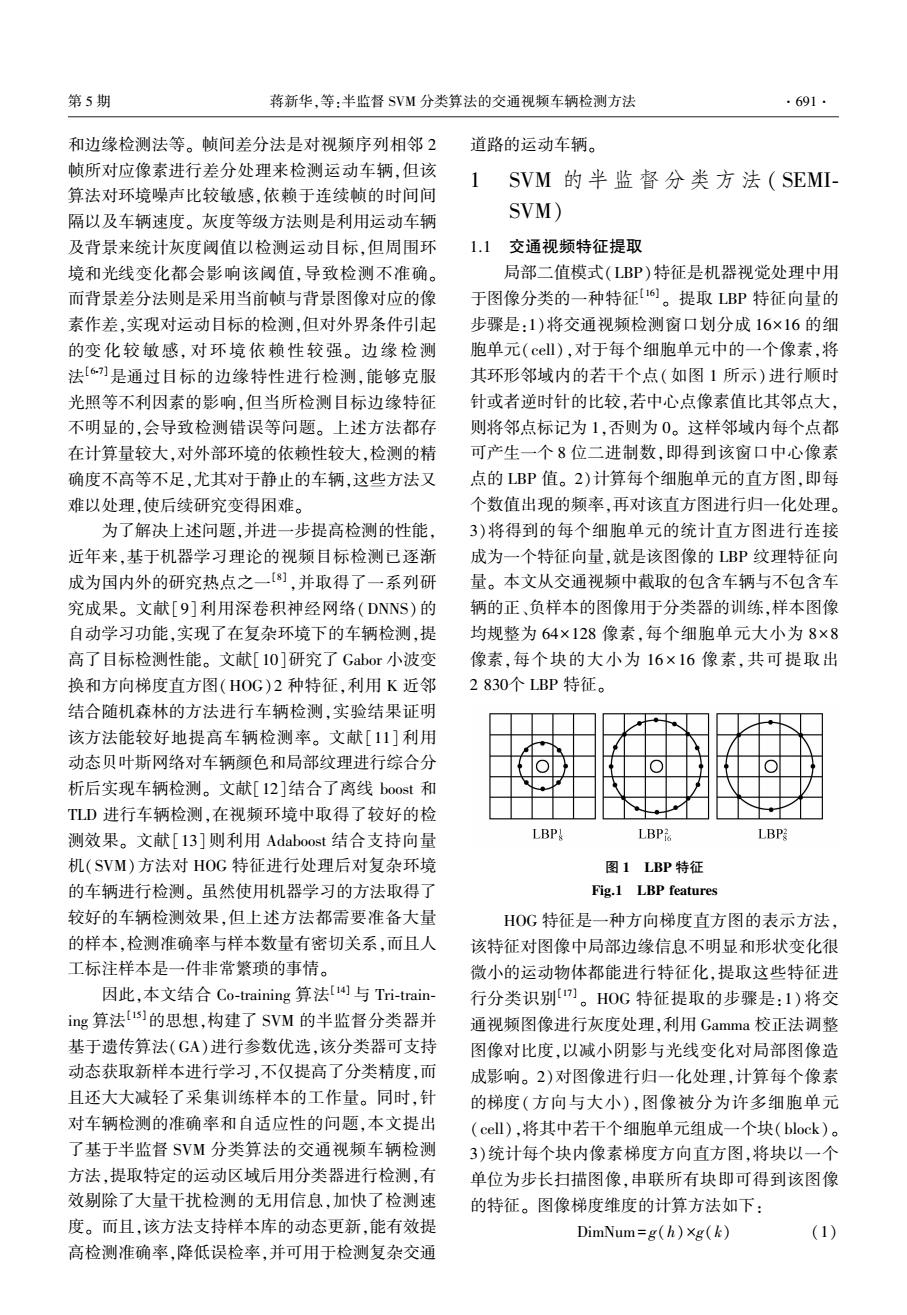
第5期 蒋新华,等:半监督SVM分类算法的交通视频车辆检测方法 ·691. 和边缘检测法等。帧间差分法是对视频序列相邻2 道路的运动车辆。 帧所对应像素进行差分处理来检测运动车辆,但该 1 SVM的半监督分类方法(SEMI 算法对环境噪声比较敏感,依赖于连续帧的时间间 隔以及车辆速度。灰度等级方法则是利用运动车辆 SVM) 及背景来统计灰度阈值以检侧运动目标,但周围环 1.1交通视频特征提取 境和光线变化都会影响该阈值,导致检测不准确。 局部二值模式(LBP)特征是机器视觉处理中用 而背景差分法则是采用当前帧与背景图像对应的像 于图像分类的一种特征16。提取LBP特征向量的 素作差,实现对运动目标的检测,但对外界条件引起 步骤是:1)将交通视频检测窗口划分成16×16的细 的变化较敏感,对环境依赖性较强。边缘检测 胞单元(cll),对于每个细胞单元中的一个像素,将 法[6是通过目标的边缘特性进行检测,能够克服 其环形邻域内的若干个点(如图1所示)进行顺时 光照等不利因素的影响,但当所检测目标边缘特征 针或者逆时针的比较,若中心点像素值比其邻点大, 不明显的,会导致检测错误等问题。上述方法都存 则将邻点标记为1,否则为0。这样邻域内每个点都 在计算量较大,对外部环境的依赖性较大,检测的精 可产生一个8位二进制数,即得到该窗口中心像素 确度不高等不足,尤其对于静止的车辆,这些方法又 点的LBP值。2)计算每个细胞单元的直方图,即每 难以处理,使后续研究变得困难。 个数值出现的频率,再对该直方图进行归一化处理。 为了解决上述问题,并进一步提高检测的性能, 3)将得到的每个细胞单元的统计直方图进行连接 近年来,基于机器学习理论的视频目标检测已逐渐 成为一个特征向量,就是该图像的LBP纹理特征向 成为国内外的研究热点之一【],并取得了一系列研 量。本文从交通视频中截取的包含车辆与不包含车 究成果。文献[9]利用深卷积神经网络(DNNS)的 辆的正、负样本的图像用于分类器的训练,样本图像 自动学习功能,实现了在复杂环境下的车辆检测,提 均规整为64×128像素,每个细胞单元大小为8×8 高了目标检测性能。文献[l0]研究了Gabor小波变 像素,每个块的大小为16×16像素,共可提取出 换和方向梯度直方图(HOG)2种特征,利用K近邻 2830个LBP特征。 结合随机森林的方法进行车辆检测,实验结果证明 该方法能较好地提高车辆检测率。文献[11]利用 动态贝叶斯网络对车辆颜色和局部纹理进行综合分 析后实现车辆检测。文献[12]结合了离线boost和 TLD进行车辆检测,在视频环境中取得了较好的检 测效果。文献[13]则利用Adaboost结合支持向量 LBP LBP LBP 机(SVM)方法对HOG特征进行处理后对复杂环境 图1LBP特征 的车辆进行检测。虽然使用机器学习的方法取得了 Fig.1 LBP features 较好的车辆检测效果,但上述方法都需要准备大量 HOG特征是一种方向梯度直方图的表示方法, 的样本,检测准确率与样本数量有密切关系,而且人 该特征对图像中局部边缘信息不明显和形状变化很 工标注样本是一件非常繁琐的事情。 微小的运动物体都能进行特征化,提取这些特征进 因此,本文结合Co-training算法[与Tri-train- 行分类识别)。H0G特征提取的步骤是:1)将交 img算法的思想,构建了SVM的半监督分类器并 通视频图像进行灰度处理,利用Gamma校正法调整 基于遗传算法(GA)进行参数优选,该分类器可支持 图像对比度,以减小阴影与光线变化对局部图像造 动态获取新样本进行学习,不仅提高了分类精度,而 成影响。2)对图像进行归一化处理,计算每个像素 且还大大减轻了采集训练样本的工作量。同时,针 的梯度(方向与大小),图像被分为许多细胞单元 对车辆检测的准确率和自适应性的问题,本文提出 (cell),将其中若干个细胞单元组成一个块(block)。 了基于半监督SVM分类算法的交通视频车辆检测 3)统计每个块内像素梯度方向直方图,将块以一个 方法,提取特定的运动区域后用分类器进行检测,有 单位为步长扫描图像,串联所有块即可得到该图像 效剔除了大量干扰检测的无用信息,加快了检测速 的特征。图像梯度维度的计算方法如下: 度。而且,该方法支持样本库的动态更新,能有效提 DimNum=g(h)×g(k) (1) 高检测准确率,降低误检率,并可用于检测复杂交通和边缘检测法等。 帧间差分法是对视频序列相邻 2 帧所对应像素进行差分处理来检测运动车辆,但该 算法对环境噪声比较敏感,依赖于连续帧的时间间 隔以及车辆速度。 灰度等级方法则是利用运动车辆 及背景来统计灰度阈值以检测运动目标,但周围环 境和光线变化都会影响该阈值,导致检测不准确。 而背景差分法则是采用当前帧与背景图像对应的像 素作差,实现对运动目标的检测,但对外界条件引起 的变 化 较 敏 感, 对 环 境 依 赖 性 较 强。 边 缘 检 测 法[6⁃7]是通过目标的边缘特性进行检测,能够克服 光照等不利因素的影响,但当所检测目标边缘特征 不明显的,会导致检测错误等问题。 上述方法都存 在计算量较大,对外部环境的依赖性较大,检测的精 确度不高等不足,尤其对于静止的车辆,这些方法又 难以处理,使后续研究变得困难。 为了解决上述问题,并进一步提高检测的性能, 近年来,基于机器学习理论的视频目标检测已逐渐 成为国内外的研究热点之一[8] ,并取得了一系列研 究成果。 文献[9]利用深卷积神经网络(DNNS)的 自动学习功能,实现了在复杂环境下的车辆检测,提 高了目标检测性能。 文献[10]研究了 Gabor 小波变 换和方向梯度直方图(HOG)2 种特征,利用 K 近邻 结合随机森林的方法进行车辆检测,实验结果证明 该方法能较好地提高车辆检测率。 文献[11] 利用 动态贝叶斯网络对车辆颜色和局部纹理进行综合分 析后实现车辆检测。 文献[12]结合了离线 boost 和 TLD 进行车辆检测,在视频环境中取得了较好的检 测效果。 文献[13] 则利用 Adaboost 结合支持向量 机(SVM)方法对 HOG 特征进行处理后对复杂环境 的车辆进行检测。 虽然使用机器学习的方法取得了 较好的车辆检测效果,但上述方法都需要准备大量 的样本,检测准确率与样本数量有密切关系,而且人 工标注样本是一件非常繁琐的事情。 因此,本文结合 Co⁃training 算法[14] 与 Tri⁃train⁃ ing 算法[15]的思想,构建了 SVM 的半监督分类器并 基于遗传算法(GA)进行参数优选,该分类器可支持 动态获取新样本进行学习,不仅提高了分类精度,而 且还大大减轻了采集训练样本的工作量。 同时,针 对车辆检测的准确率和自适应性的问题,本文提出 了基于半监督 SVM 分类算法的交通视频车辆检测 方法,提取特定的运动区域后用分类器进行检测,有 效剔除了大量干扰检测的无用信息,加快了检测速 度。 而且,该方法支持样本库的动态更新,能有效提 高检测准确率,降低误检率,并可用于检测复杂交通 道路的运动车辆。 1 SVM 的半监督分类 方 法 ( SEMI⁃ SVM) 1.1 交通视频特征提取 局部二值模式(LBP)特征是机器视觉处理中用 于图像分类的一种特征[16] 。 提取 LBP 特征向量的 步骤是:1)将交通视频检测窗口划分成 16×16 的细 胞单元(cell),对于每个细胞单元中的一个像素,将 其环形邻域内的若干个点(如图 1 所示) 进行顺时 针或者逆时针的比较,若中心点像素值比其邻点大, 则将邻点标记为 1,否则为 0。 这样邻域内每个点都 可产生一个 8 位二进制数,即得到该窗口中心像素 点的 LBP 值。 2)计算每个细胞单元的直方图,即每 个数值出现的频率,再对该直方图进行归一化处理。 3)将得到的每个细胞单元的统计直方图进行连接 成为一个特征向量,就是该图像的 LBP 纹理特征向 量。 本文从交通视频中截取的包含车辆与不包含车 辆的正、负样本的图像用于分类器的训练,样本图像 均规整为 64×128 像素,每个细胞单元大小为 8×8 像素,每个块的大小为 16 × 16 像素,共可提取出 2 830个 LBP 特征。 图 1 LBP 特征 Fig.1 LBP features HOG 特征是一种方向梯度直方图的表示方法, 该特征对图像中局部边缘信息不明显和形状变化很 微小的运动物体都能进行特征化,提取这些特征进 行分类识别[17] 。 HOG 特征提取的步骤是:1) 将交 通视频图像进行灰度处理,利用 Gamma 校正法调整 图像对比度,以减小阴影与光线变化对局部图像造 成影响。 2)对图像进行归一化处理,计算每个像素 的梯度(方向与大小),图像被分为许多细胞单元 (cell),将其中若干个细胞单元组成一个块(block)。 3)统计每个块内像素梯度方向直方图,将块以一个 单位为步长扫描图像,串联所有块即可得到该图像 的特征。 图像梯度维度的计算方法如下: DimNum = g(h)×g(k) (1) 第 5 期 蒋新华,等:半监督 SVM 分类算法的交通视频车辆检测方法 ·691·