正在加载图片...
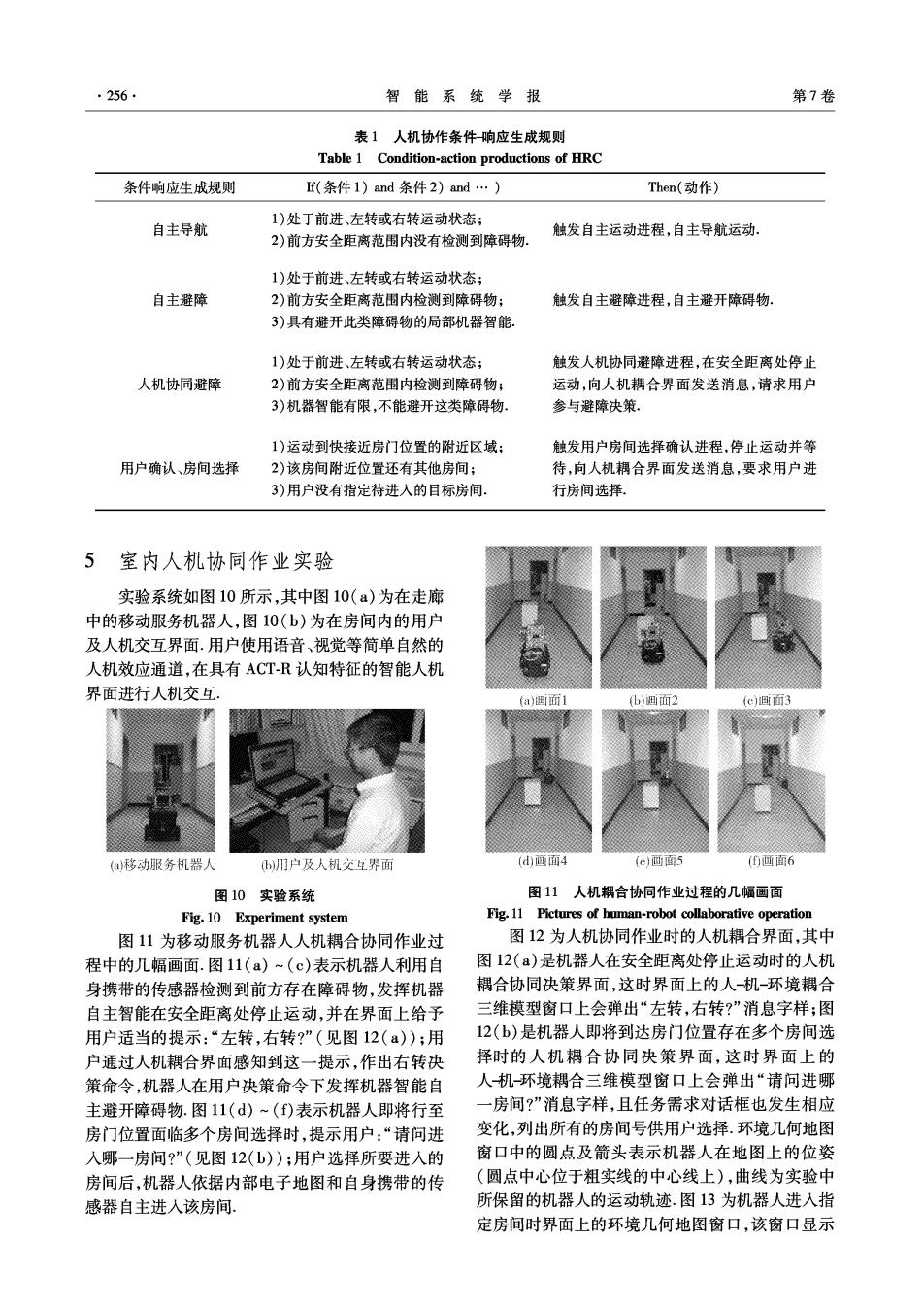
.256. 智能系统学报 第7卷 表1人机协作条件响应生成规则 Table 1 Condition-action productions of HRC 条件响应生成规则 f(条件1)and条件2)and…) Then(动作) 1)处于前进、左转或右转运动状态; 自主导航 触发自主运动进程,自主导航运动, 2)前方安全距离范围内没有检测到障碍物. 1)处于前进、左转或右转运动状态; 自主避障 2)前方安全距离范围内检测到障碍物; 触发自主避障进程,自主避开障碍物, 3)具有避开此类障碍物的局部机器智能。 1)处于前进、左转或右转运动状态; 触发人机协同避障进程,在安全距离处停止 人机协同避障 2)前方安全距离范围内检测到障碍物: 运动,向人机耦合界面发送消息,请求用户 3)机器智能有限,不能避开这类障碍物 参与避障决策。 1)运动到快接近房门位置的附近区域: 触发用户房间选择确认进程,停止运动并等 用户确认、房间选择 2)该房间附近位置还有其他房间; 待,向人机耦合界面发送消息,要求用户进 3)用户没有指定待进入的目标房间. 行房间选择 5 室内人机协同作业实验 实验系统如图10所示,其中图10(a)为在走廊 中的移动服务机器人,图10(b)为在房间内的用户 及人机交互界面.用户使用语音、视觉等简单自然的 人机效应通道,在具有ACT-R认知特征的智能人机 界面进行人机交互, a)画面1 b)西面2 (c)画面3 a移动服务机器人 加户及人机交车界面 (d画面4 (e)画面5 (f)画面6 图10实验系统 图11人机耦合协同作业过程的几幅画面 Fig.10 Experiment system Fig.11 Pictures of human-robot collaborative operation 图11为移动服务机器人人机耦合协同作业过 图12为人机协同作业时的人机耦合界面,其中 程中的几幅画面.图11(a)~(c)表示机器人利用自 图12(a)是机器人在安全距离处停止运动时的人机 身携带的传感器检测到前方存在障碍物,发挥机器 耦合协同决策界面,这时界面上的人-机-环境耦合 自主智能在安全距离处停止运动,并在界面上给予 三维模型窗口上会弹出“左转,右转?”消息字样;图 用户适当的提示:“左转,右转?”(见图12(a);用 12(b)是机器人即将到达房门位置存在多个房间选 户通过人机耦合界面感知到这一提示,作出右转决 择时的人机耦合协同决策界面,这时界面上的 策命令,机器人在用户决策命令下发挥机器智能自 人机-环境耦合三维模型窗口上会弹出“请问进哪 主避开障碍物.图11(d)~(f)表示机器人即将行至 一房间?”消息字样,且任务需求对话框也发生相应 房门位置面临多个房间选择时,提示用户:“请问进 变化,列出所有的房间号供用户选择.环境几何地图 入哪一房间?”(见图12(b)):用户选择所要进人的 窗口中的圆点及箭头表示机器人在地图上的位姿 房间后,机器人依据内部电子地图和自身携带的传 (圆点中心位于粗实线的中心线上),曲线为实验中 感器自主进人该房间, 所保留的机器人的运动轨迹.图13为机器人进入指 定房间时界面上的环境几何地图窗口,该窗口显示