正在加载图片...
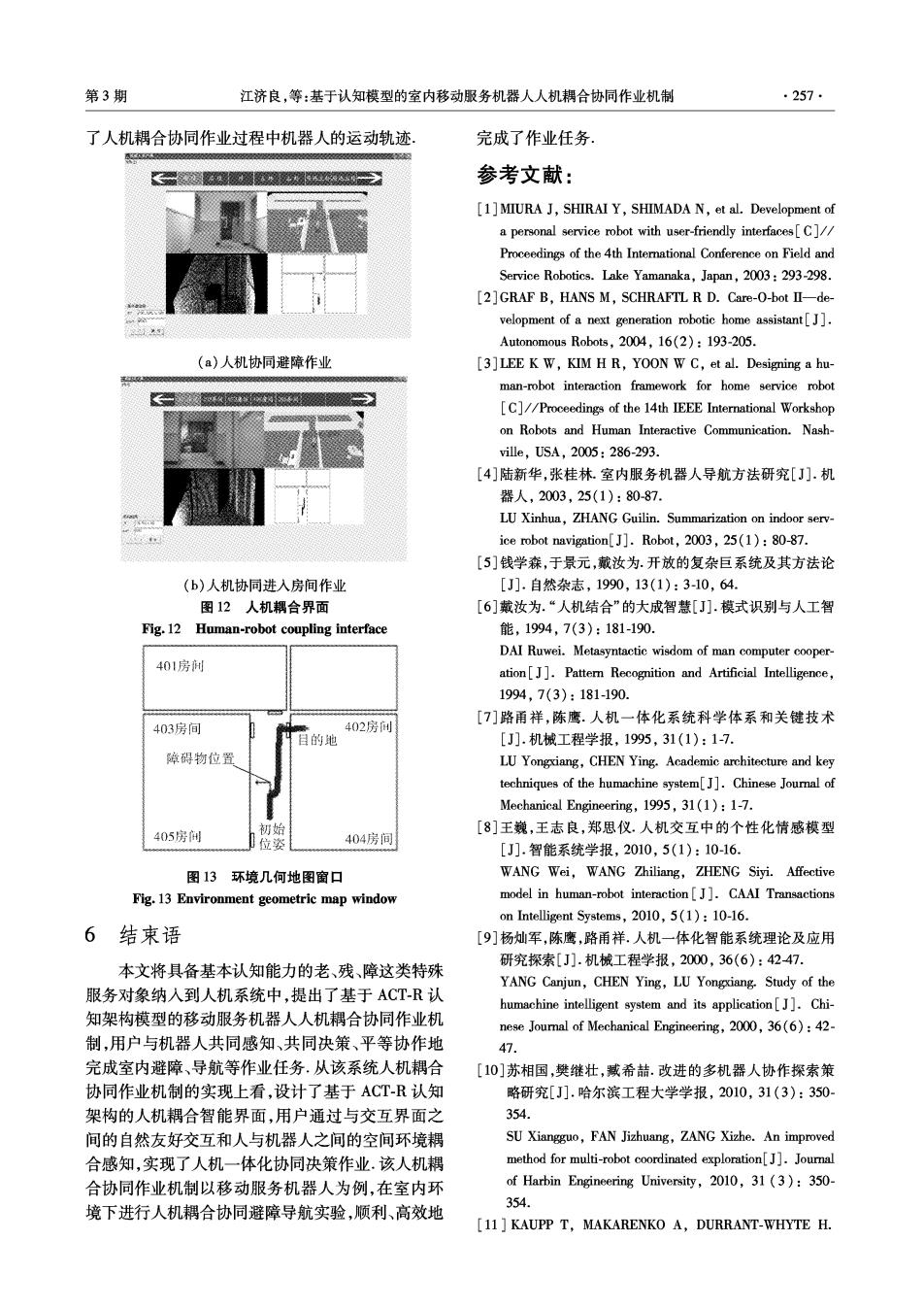
第3期 江济良,等:基于认知模型的室内移动服务机器人人机耦合协同作业机制 .257. 了人机耦合协同作业过程中机器人的运动轨迹, 完成了作业任务 参考文献: [1]MIURA J,SHIRAI Y,SHIMADA N,et al.Development of a personal service robot with user-friendly interfaces[C]/ Proceedings of the 4th International Conference on Field and Service Robotics.Lake Yamanaka,Japan,2003:293-298. [2]GRAF B,HANS M,SCHRAFTL R D.Care-O-bot II-de- velopment of a next generation robotic home assistant[J]. Autonomous Robots,2004,16(2):193-205. (a)人机协同避障作业 [3]LEE K W,KIM H R,YOON W C,et al.Designing a hu- man-robot interaction framework for home service robot [C]//Proceedings of the 14th IEEE International Workshop on Robots and Human Interactive Communication.Nash- ville,USA,2005:286-293. [4]陆新华,张桂林.室内服务机器人导航方法研究[J].机 器人,2003,25(1):80-87. LU Xinhua,ZHANG Guilin.Summarization on indoor serv- ice robot navigation[J].Robot,2003,25(1):80-87. [5]钱学森,于景元,戴汝为.开放的复杂巨系统及其方法论 (b)人机协同进入房间作业 [J].自然杂志,1990,13(1):3-10,64. 图12人机耦合界面 [6]戴汝为.“人机结合”的大成智慧[J刀.模式识别与人工智 Fig.12 Human-robot coupling interface 能,1994,7(3):181-190. DAI Ruwei.Metasyntactic wisdom of man computer cooper- 401房间 ation[J].Pattern Recognition and Artificial Intelligence, 1994,7(3):181-190. [7]路甬祥,陈鹰.人机一体化系统科学体系和关键技术 403房间 402房间 目的地 [J].机械工程学报,1995,31(1):1-7. 障碍物位置 LU Yongxiang,CHEN Ying.Academic architecture and key techniques of the humachine system[J].Chinese Journal of Mechanical Engineering,1995,31(1):1-7. 405房间 初始 [8]王巍,王志良,郑思仪.人机交互中的个性化情感模型 位姿 404房间 [J].智能系统学报,2010,5(1):10-16. 图13环境几何地图窗口 WANG Wei,WANG Zhiliang,ZHENG Siyi.Affective Fig.13 Environment geometric map window model in human-robot interaction[J].CAAI Transactions on Intelligent Systems,2010,5(1):10-16. 6 结束语 [9]杨灿军,陈鹰,路甬祥.人机一体化智能系统理论及应用 研究探索[J].机械工程学报,2000,36(6):4247. 本文将具备基本认知能力的老、残、障这类特殊 YANG Canjun,CHEN Ying,LU Yongxiang.Study of the 服务对象纳入到人机系统中,提出了基于ACT-R认 humachine intelligent system and its application[].Chi- 知架构模型的移动服务机器人人机耦合协同作业机 nese Journal of Mechanical Engineering,2000,36(6):42- 制,用户与机器人共同感知、共同决策、平等协作地 47. 完成室内避障、导航等作业任务,从该系统人机耦合 [10]苏相国,樊继壮,臧希喆.改进的多机器人协作探索策 协同作业机制的实现上看,设计了基于ACT-R认知 略研究[J].哈尔滨工程大学学报,2010,31(3):350 架构的人机耦合智能界面,用户通过与交互界面之 354. 间的自然友好交互和人与机器人之间的空间环境耦 SU Xiangguo,FAN Jizhuang,ZANG Xizhe.An improved 合感知,实现了人机一体化协同决策作业.该人机耦 method for multi-robot coordinated exploration[J].Journal 合协同作业机制以移动服务机器人为例,在室内环 of Harbin Engineering University,2010,31(3):350- 境下进行人机耦合协同避障导航实验,顺利、高效地 354. [11 KAUPP T,MAKARENKO A,DURRANT-WHYTE H