正在加载图片...
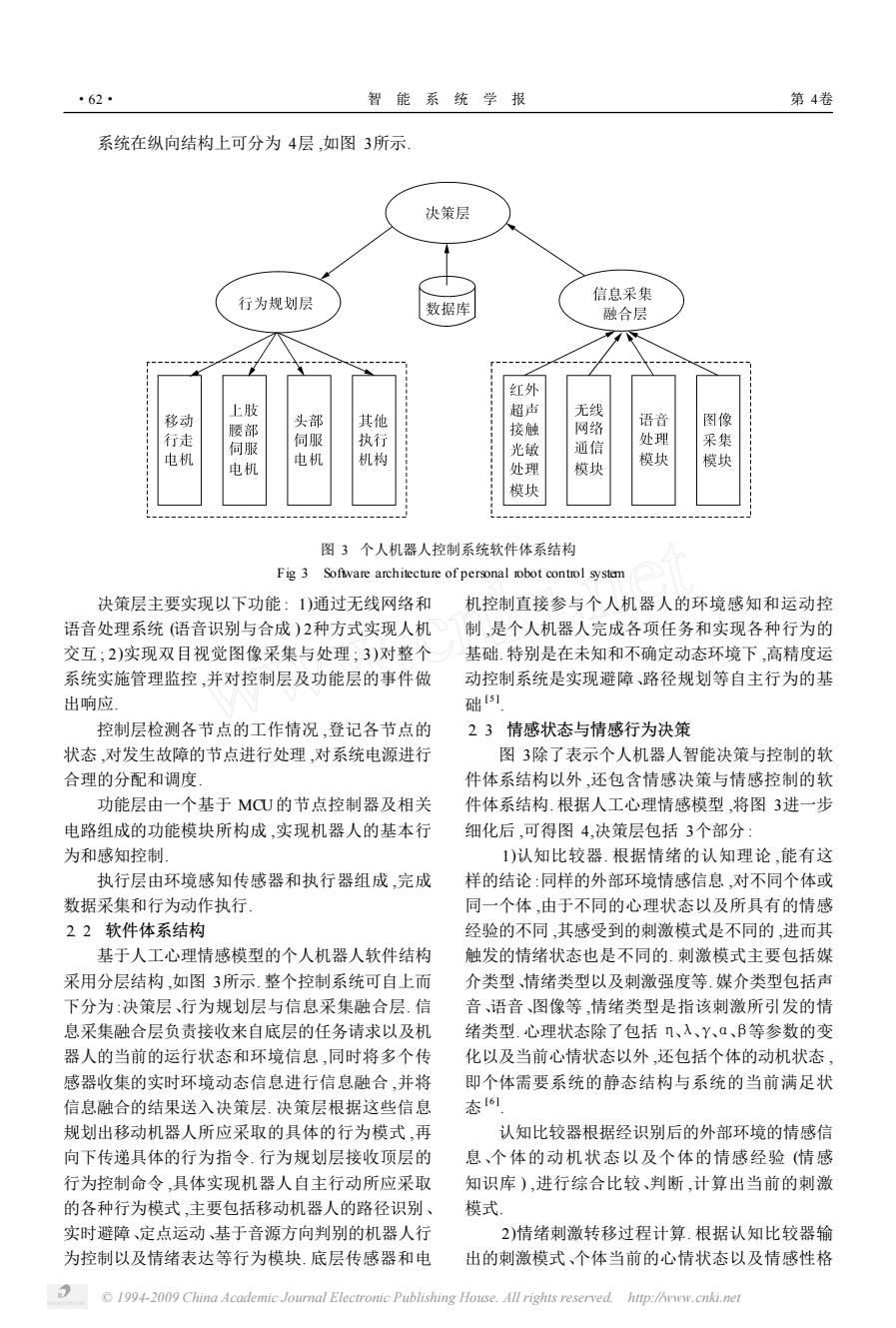
62 智能系统学报 第4卷 系统在纵向结构上可分为4层,如图3所示。 决策层 行为规划层 信息采集 数据库 融合层 红外 上肢 超声 无线 移动 语音 行走 腰部 头部 其他 接触 网络 图像 电机 伺服 伺服 执行 处理 采集 电机 机构 光敏 通信 模块 电机 处理 模块 模块 模块 图3个人机器人控制系统软件体系结构 Fig 3 Sofware architecture of personal robot control system 决策层主要实现以下功能:1)通过无线网络和 机控制直接参与个人机器人的环境感知和运动控 语音处理系统(语音识别与合成)2种方式实现人机 制,是个人机器人完成各项任务和实现各种行为的 交互:2)实现双目视觉图像采集与处理:3)对整个 基础.特别是在未知和不确定动态环境下,高精度运 系统实施管理监控,并对控制层及功能层的事件做 动控制系统是实现避障、路径规划等自主行为的基 出响应 础 控制层检测各节点的工作情况,登记各节点的 23情感状态与情感行为决策 状态,对发生故障的节点进行处理,对系统电源进行 图3除了表示个人机器人智能决策与控制的软 合理的分配和调度 件体系结构以外,还包含情感决策与情感控制的软 功能层由一个基于MCU的节点控制器及相关 件体系结构.根据人工心理情感模型,将图3进一步 电路组成的功能模块所构成,实现机器人的基本行 细化后,可得图4,决策层包括3个部分: 为和感知控制。 1)认知比较器.根据情绪的认知理论,能有这 执行层由环境感知传感器和执行器组成,完成 样的结论:同样的外部环境情感信息,对不同个体或 数据采集和行为动作执行 同一个体,由于不同的心理状态以及所具有的情感 22软件体系结构 经验的不同,其感受到的刺激模式是不同的,进而其 基于人工心理情感模型的个人机器人软件结构 触发的情绪状态也是不同的.刺激模式主要包括媒 采用分层结构,如图3所示.整个控制系统可自上而 介类型、情绪类型以及刺激强度等,媒介类型包括声 下分为:决策层、行为规划层与信息采集融合层.信 音、语音、图像等,情绪类型是指该刺激所引发的情 息采集融合层负责接收来自底层的任务请求以及机 绪类型.心理状态除了包括n、入、Y、a、β等参数的变 器人的当前的运行状态和环境信息,同时将多个传 化以及当前心情状态以外,还包括个体的动机状态, 感器收集的实时环境动态信息进行信息融合,并将 即个体需要系统的静态结构与系统的当前满足状 信息融合的结果送入决策层.决策层根据这些信息 态61 规划出移动机器人所应采取的具体的行为模式,再 认知比较器根据经识别后的外部环境的情感信 向下传递具体的行为指令.行为规划层接收顶层的 息、个体的动机状态以及个体的情感经验(情感 行为控制命令,具体实现机器人自主行动所应采取 知识库),进行综合比较、判断,计算出当前的刺激 的各种行为模式,主要包括移动机器人的路径识别、 模式 实时避障、定点运动、基于音源方向判别的机器人行 2)情绪刺激转移过程计算.根据认知比较器输 为控制以及情绪表达等行为模块.底层传感器和电 出的刺激模式、个体当前的心情状态以及情感性格 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net系统在纵向结构上可分为 4层 ,如图 3所示. 图 3 个人机器人控制系统软件体系结构 Fig. 3 Software architecture of personal robot control system 决策层主要实现以下功能 : 1)通过无线网络和 语音处理系统 (语音识别与合成 ) 2种方式实现人机 交互 ; 2)实现双目视觉图像采集与处理 ; 3)对整个 系统实施管理监控 ,并对控制层及功能层的事件做 出响应. 控制层检测各节点的工作情况 ,登记各节点的 状态 ,对发生故障的节点进行处理 ,对系统电源进行 合理的分配和调度. 功能层由一个基于 MCU的节点控制器及相关 电路组成的功能模块所构成 ,实现机器人的基本行 为和感知控制. 执行层由环境感知传感器和执行器组成 ,完成 数据采集和行为动作执行. 2. 2 软件体系结构 基于人工心理情感模型的个人机器人软件结构 采用分层结构 ,如图 3所示. 整个控制系统可自上而 下分为 :决策层、行为规划层与信息采集融合层. 信 息采集融合层负责接收来自底层的任务请求以及机 器人的当前的运行状态和环境信息 ,同时将多个传 感器收集的实时环境动态信息进行信息融合 ,并将 信息融合的结果送入决策层. 决策层根据这些信息 规划出移动机器人所应采取的具体的行为模式 ,再 向下传递具体的行为指令. 行为规划层接收顶层的 行为控制命令 ,具体实现机器人自主行动所应采取 的各种行为模式 ,主要包括移动机器人的路径识别、 实时避障、定点运动、基于音源方向判别的机器人行 为控制以及情绪表达等行为模块. 底层传感器和电 机控制直接参与个人机器人的环境感知和运动控 制 ,是个人机器人完成各项任务和实现各种行为的 基础. 特别是在未知和不确定动态环境下 ,高精度运 动控制系统是实现避障、路径规划等自主行为的基 础 [ 5 ] . 2. 3 情感状态与情感行为决策 图 3除了表示个人机器人智能决策与控制的软 件体系结构以外 ,还包含情感决策与情感控制的软 件体系结构. 根据人工心理情感模型 ,将图 3进一步 细化后 ,可得图 4,决策层包括 3个部分 : 1)认知比较器. 根据情绪的认知理论 ,能有这 样的结论 :同样的外部环境情感信息 ,对不同个体或 同一个体 ,由于不同的心理状态以及所具有的情感 经验的不同 ,其感受到的刺激模式是不同的 ,进而其 触发的情绪状态也是不同的. 刺激模式主要包括媒 介类型、情绪类型以及刺激强度等. 媒介类型包括声 音、语音、图像等 ,情绪类型是指该刺激所引发的情 绪类型. 心理状态除了包括 η、λ、γ、α、β等参数的变 化以及当前心情状态以外 ,还包括个体的动机状态 , 即个体需要系统的静态结构与系统的当前满足状 态 [ 6 ] . 认知比较器根据经识别后的外部环境的情感信 息、个体的动机状态以及个体的情感经验 (情感 知识库 ) ,进行综合比较、判断 ,计算出当前的刺激 模式. 2)情绪刺激转移过程计算. 根据认知比较器输 出的刺激模式、个体当前的心情状态以及情感性格 ·62· 智 能 系 统 学 报 第 4卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net