正在加载图片...
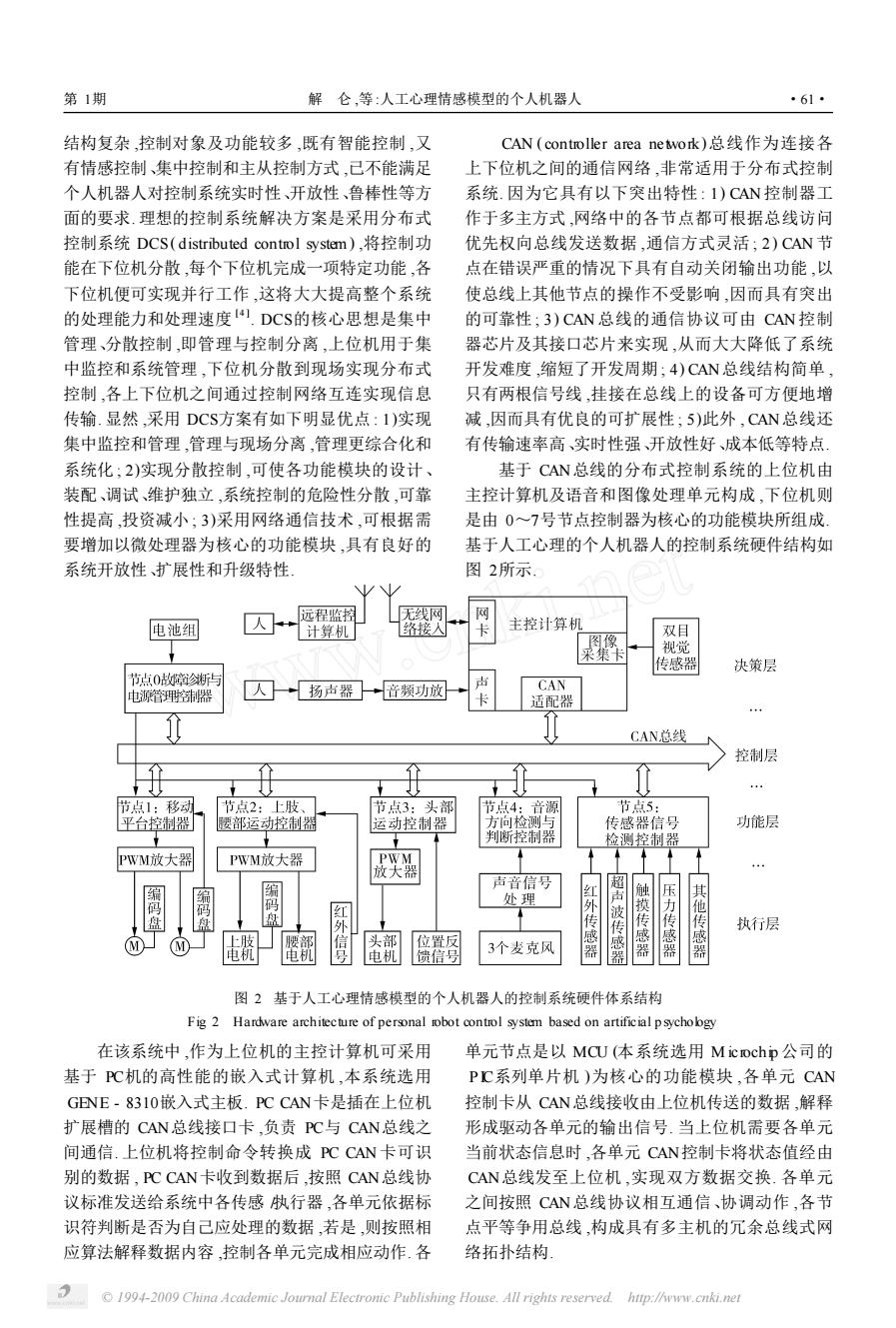
第1期 解仑,等:人工心理情感模型的个人机器人 。61 结构复杂,控制对象及功能较多,既有智能控制,又 CAN(controller area netork)总线作为连接各 有情感控制、集中控制和主从控制方式,已不能满足 上下位机之间的通信网络,非常适用于分布式控制 个人机器人对控制系统实时性、开放性、鲁棒性等方 系统.因为它具有以下突出特性:1)CAN控制器工 面的要求.理想的控制系统解决方案是采用分布式 作于多主方式,网络中的各节点都可根据总线访问 控制系统DCS(distributed control system),将控制功 优先权向总线发送数据,通信方式灵活:2)CAN节 能在下位机分散,每个下位机完成一项特定功能,各 点在错误严重的情况下具有自动关闭输出功能,以 下位机便可实现并行工作,这将大大提高整个系统 使总线上其他节点的操作不受影响,因而具有突出 的处理能力和处理速度].DCS的核心思想是集中 的可靠性;3)CAN总线的通信协议可由CAN控制 管理、分散控制,即管理与控制分离,上位机用于集 器芯片及其接口芯片来实现,从而大大降低了系统 中监控和系统管理,下位机分散到现场实现分布式 开发难度,缩短了开发周期;4)CAN总线结构简单, 控制,各上下位机之间通过控制网络互连实现信息 只有两根信号线,挂接在总线上的设备可方便地增 传输.显然,采用DCS方案有如下明显优点:1)实现 减,因而具有优良的可扩展性;5)此外,CAN总线还 集中监控和管理,管理与现场分离,管理更综合化和 有传输速率高、实时性强、开放性好、成本低等特点 系统化:2)实现分散控制,可使各功能模块的设计、 基于CAN总线的分布式控制系统的上位机由 装配、调试、维护独立,系统控制的危险性分散,可靠 主控计算机及语音和图像处理单元构成,下位机则 性提高,投资减小;3)采用网络通信技术,可根据需 是由0一7号节点控制器为核心的功能模块所组成 要增加以微处理器为核心的功能模块,具有良好的 基于人工心理的个人机器人的控制系统硬件结构如 系统开放性、扩展性和升级特性。 图2所示. 远程监摆 无线网 网 电池组 计算机 络接人 主控计算机 双目 图像 采集卡 视觉 传感器 决策层 节点0故诊断华 人 扬声器 音频功放 CAN 电源管理制器 卡 适配器 CAN总线 控制层 节点1:移司 节点2:上肢、 节点3:头部 节点4:音源 节点5: 平台控制器】 腰部运动控制器 运动控制器 方向检测与 传感器信号 功能层 判断控制器 检测控制器 PWM放大器 PWM放大器 PWM 放大器 声音信号 超 编 触 压 处理 红 外 盘 传 模 传感 传 执行层 头部 位置反 感 电机 电机 馈信号 3个麦克风 器 器 感器 图2基于人工心理情感模型的个人机器人的控制系统硬件体系结构 Fig 2 Hardware architecture of personal robot control system based on artificial psychobgy 在该系统中,作为上位机的主控计算机可采用 单元节点是以MCU(本系统选用M icrochip公司的 基于P℃机的高性能的嵌入式计算机,本系统选用 PC系列单片机)为核心的功能模块,各单元CAN GDNE-8310嵌入式主板.PC CAN卡是插在上位机 控制卡从CAN总线接收由上位机传送的数据,解释 扩展槽的CAN总线接口卡,负责PC与CAN总线之 形成驱动各单元的输出信号.当上位机需要各单元 间通信.上位机将控制命令转换成PC CAN卡可识 当前状态信息时,各单元CAN控制卡将状态值经由 别的数据,PC CAN卡收到数据后,按照CAN总线协 CAN总线发至上位机,实现双方数据交换.各单元 议标准发送给系统中各传感执行器,各单元依据标 之间按照CAN总线协议相互通信、协调动作,各节 识符判断是否为自己应处理的数据,若是,则按照相 点平等争用总线,构成具有多主机的冗余总线式网 应算法解释数据内容,控制各单元完成相应动作.各 络拓扑结构 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved hup://www.cnki.net结构复杂 ,控制对象及功能较多 ,既有智能控制 ,又 有情感控制、集中控制和主从控制方式 ,已不能满足 个人机器人对控制系统实时性、开放性、鲁棒性等方 面的要求. 理想的控制系统解决方案是采用分布式 控制系统 DCS( distributed control system) ,将控制功 能在下位机分散 ,每个下位机完成一项特定功能 ,各 下位机便可实现并行工作 ,这将大大提高整个系统 的处理能力和处理速度 [ 4 ] . DCS的核心思想是集中 管理、分散控制 ,即管理与控制分离 ,上位机用于集 中监控和系统管理 ,下位机分散到现场实现分布式 控制 ,各上下位机之间通过控制网络互连实现信息 传输. 显然 ,采用 DCS方案有如下明显优点 : 1)实现 集中监控和管理 ,管理与现场分离 ,管理更综合化和 系统化 ; 2)实现分散控制 ,可使各功能模块的设计、 装配、调试、维护独立 ,系统控制的危险性分散 ,可靠 性提高 ,投资减小 ; 3)采用网络通信技术 ,可根据需 要增加以微处理器为核心的功能模块 ,具有良好的 系统开放性、扩展性和升级特性. CAN ( controller area network)总线作为连接各 上下位机之间的通信网络 ,非常适用于分布式控制 系统. 因为它具有以下突出特性 : 1) CAN控制器工 作于多主方式 ,网络中的各节点都可根据总线访问 优先权向总线发送数据 ,通信方式灵活 ; 2) CAN 节 点在错误严重的情况下具有自动关闭输出功能 ,以 使总线上其他节点的操作不受影响 ,因而具有突出 的可靠性 ; 3) CAN 总线的通信协议可由 CAN 控制 器芯片及其接口芯片来实现 ,从而大大降低了系统 开发难度 ,缩短了开发周期 ; 4) CAN总线结构简单 , 只有两根信号线 ,挂接在总线上的设备可方便地增 减 ,因而具有优良的可扩展性 ; 5)此外 , CAN总线还 有传输速率高、实时性强、开放性好、成本低等特点. 基于 CAN总线的分布式控制系统的上位机由 主控计算机及语音和图像处理单元构成 ,下位机则 是由 0~7号节点控制器为核心的功能模块所组成. 基于人工心理的个人机器人的控制系统硬件结构如 图 2所示. 图 2 基于人工心理情感模型的个人机器人的控制系统硬件体系结构 Fig. 2 Hardware architecture of personal robot control system based on artificial p sychology 在该系统中 ,作为上位机的主控计算机可采用 基于 PC机的高性能的嵌入式计算机 ,本系统选用 GENE - 8310嵌入式主板. PC CAN卡是插在上位机 扩展槽的 CAN总线接口卡 ,负责 PC与 CAN总线之 间通信. 上位机将控制命令转换成 PC CAN卡可识 别的数据 , PC CAN卡收到数据后 ,按照 CAN总线协 议标准发送给系统中各传感 /执行器 ,各单元依据标 识符判断是否为自己应处理的数据 ,若是 ,则按照相 应算法解释数据内容 ,控制各单元完成相应动作. 各 单元节点是以 MCU (本系统选用 M icrochip公司的 PIC系列单片机 )为核心的功能模块 ,各单元 CAN 控制卡从 CAN总线接收由上位机传送的数据 ,解释 形成驱动各单元的输出信号. 当上位机需要各单元 当前状态信息时 ,各单元 CAN控制卡将状态值经由 CAN总线发至上位机 ,实现双方数据交换. 各单元 之间按照 CAN总线协议相互通信、协调动作 ,各节 点平等争用总线 ,构成具有多主机的冗余总线式网 络拓扑结构. 第 1期 解 仑 ,等 :人工心理情感模型的个人机器人 ·61· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net