正在加载图片...
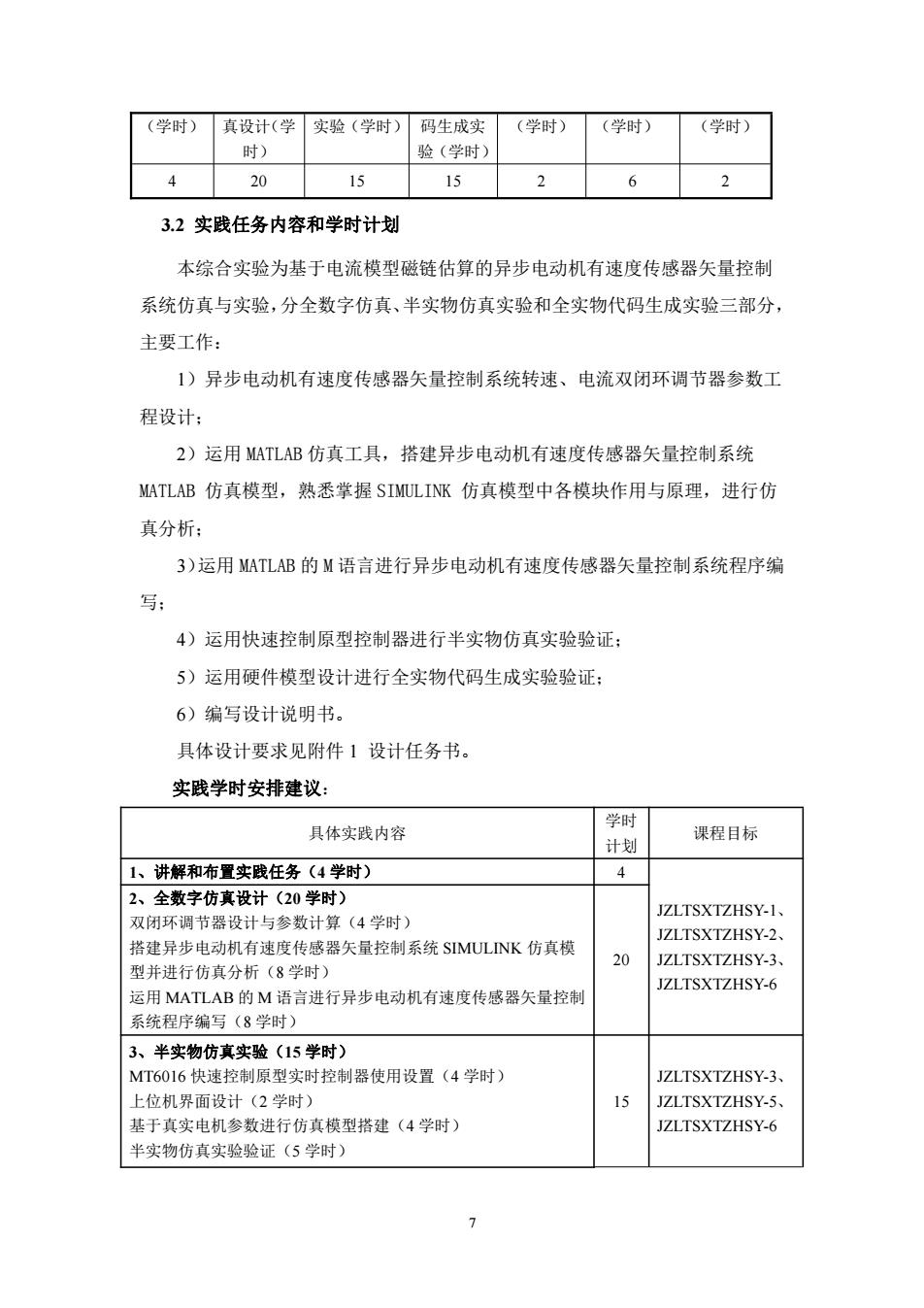
(学时) 真设计(学实验(学时)码生成实 (学时) (学时) (学时) 时) 验(学时) 20 15 15 2 6 2 3.2实践任务内容和学时计划 本综合实验为基于电流模型磁链估算的异步电动机有速度传感器矢量控制 系统仿真与实验,分全数字仿真、半实物仿真实验和全实物代码生成实验三部分 主要工作: 1)异步电动机有速度传感器矢量控制系统转速、电流双闭环调节器参数工 程设计: 2)运用MATLAB仿真工具,搭建异步电动机有速度传感器矢量控制系统 MATLAB仿真模型,熟悉掌握SIMULINK仿真模型中各模块作用与原理,进行仿 真分析: 3)运用MATLAB的M语言进行异步电动机有速度传感器矢量控制系统程序编 写: 4)运用快速控制原型控制器进行半实物仿真实验验证: 5)运用硬件模型设计进行全实物代码生成实验验证: 6)编写设计说明书。 具体设计要求见附件】设计任务书。 实践学时安排建议: 具体实践内容 学时 课程目标 计划 1、讲解和布置实践任务(4学时) 4 2、全数字仿真设计(20学时) IZLTSXTZHSY-L 双闭环调节器设计与参数计算(4学时) JZLISXTZHSY-2 搭建异步电动机有速度传感器矢量控制系统SIMULINK仿真模 型并进行仿真分析(8学时 20 JZLTSXTZHSY-3、 运用MATLAB的M语言进行异步电动机有速度传感器矢量控制 JZLTSXTZHSY-6 系统程序编写(8学时) 3、半实物仿真实验(15学时) MT6016快速控制原型实时控制器使用设置(4学时) JZLTSXTZHSY-3. 上位机界面设计(2学时) 15 JZLTSXTZHSY-5. 基于真实电机参数进行仿真模型搭建(4学时) JZLTSXTZHSY-6 半实物仿真实验验证(5学时)7 (学时) 真设计(学 时) 实验(学时) 码生成实 验(学时) (学时) (学时) (学时) 4 20 15 15 2 6 2 3.2 实践任务内容和学时计划 本综合实验为基于电流模型磁链估算的异步电动机有速度传感器矢量控制 系统仿真与实验,分全数字仿真、半实物仿真实验和全实物代码生成实验三部分, 主要工作: 1)异步电动机有速度传感器矢量控制系统转速、电流双闭环调节器参数工 程设计; 2)运用 MATLAB 仿真工具,搭建异步电动机有速度传感器矢量控制系统 MATLAB 仿真模型,熟悉掌握 SIMULINK 仿真模型中各模块作用与原理,进行仿 真分析; 3)运用 MATLAB 的 M 语言进行异步电动机有速度传感器矢量控制系统程序编 写; 4)运用快速控制原型控制器进行半实物仿真实验验证; 5)运用硬件模型设计进行全实物代码生成实验验证; 6)编写设计说明书。 具体设计要求见附件 1 设计任务书。 实践学时安排建议: 具体实践内容 学时 计划 课程目标 1、讲解和布置实践任务(4 学时) 4 JZLTSXTZHSY-1、 JZLTSXTZHSY-2、 JZLTSXTZHSY-3、 JZLTSXTZHSY-6 2、全数字仿真设计(20 学时) 双闭环调节器设计与参数计算(4 学时) 搭建异步电动机有速度传感器矢量控制系统 SIMULINK 仿真模 型并进行仿真分析(8 学时) 运用 MATLAB 的 M 语言进行异步电动机有速度传感器矢量控制 系统程序编写(8 学时) 20 3、半实物仿真实验(15 学时) MT6016 快速控制原型实时控制器使用设置(4 学时) 上位机界面设计(2 学时) 基于真实电机参数进行仿真模型搭建(4 学时) 半实物仿真实验验证(5 学时) 15 JZLTSXTZHSY-3、 JZLTSXTZHSY-5、 JZLTSXTZHSY-6