正在加载图片...
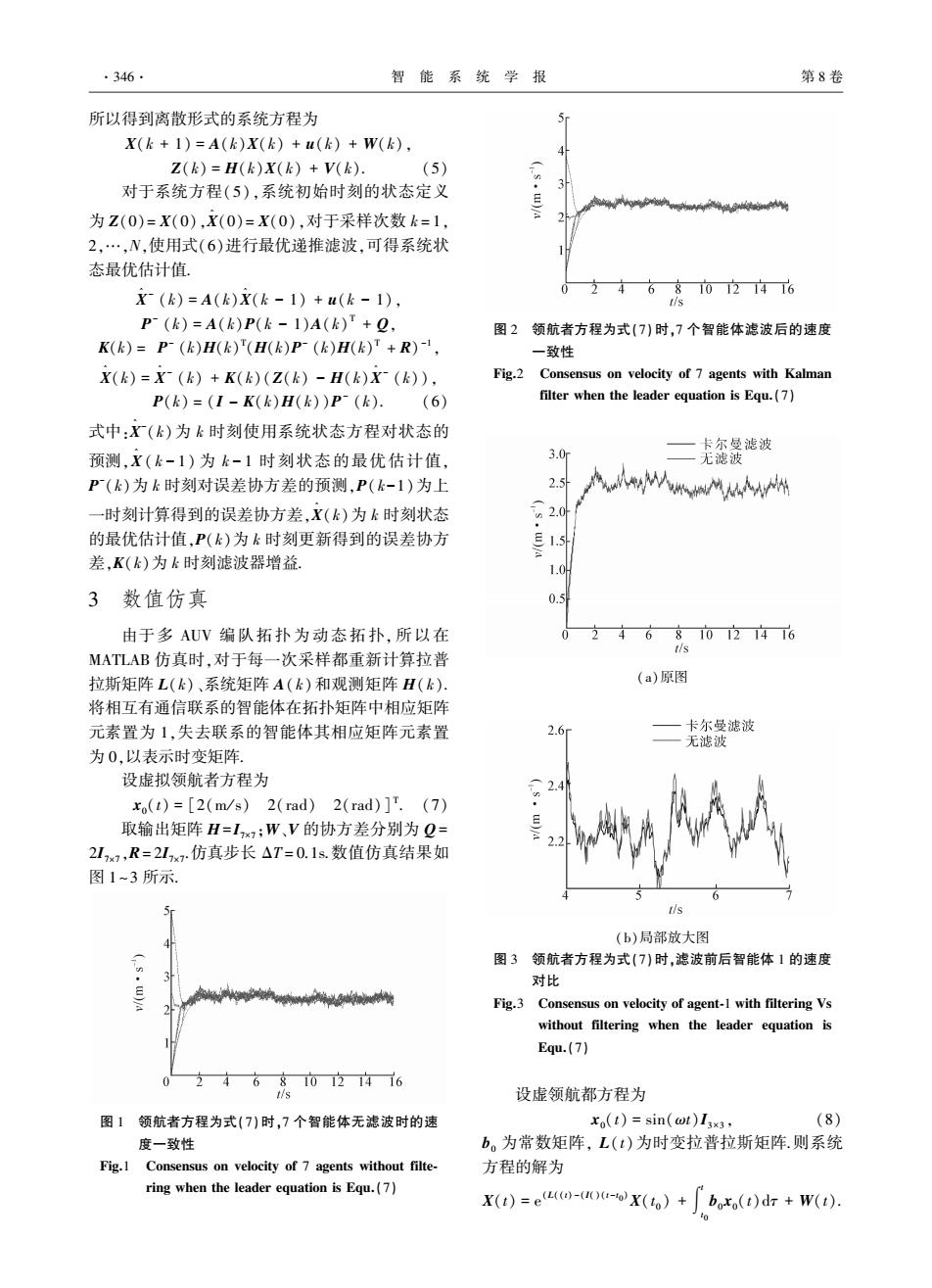
·346. 智能系统学报 第8卷 所以得到离散形式的系统方程为 X(k+1)=A(k)X(k)+u(k)+W(k), Z(k)=H(k)X(k)+V(k). (5) 对于系统方程(5),系统初始时刻的状态定义 为Z(0)=X(0),X(0)=X(0),对于采样次数k=1, 2,…,N,使用式(6)进行最优递推滤波,可得系统状 态最优估计值。 X(k)=A(k)X(k-1)+u(k-1), 2468102146 P-(k)=A(k)P(k-1)A(k)"+, 图2领航者方程为式(7)时,7个智能体滤波后的速度 K(k)=P-(kH(k)(H(k)P-(k)H(k)+R)-, 一致性 X(k)=X(k)+K()(Z(k)-H()()), Fig.2 Consensus on velocity of 7 agents with Kalman P(k)=(I-K()H(k)P(k).(6) filter when the leader equation is Equ.(7) 式中:X(k)为k时刻使用系统状态方程对状态的 卡尔曼滤波 预测,X(k-1)为k-1时刻状态的最优估计值, 3.0m 无滤波 P(k)为k时刻对误差协方差的预测,P(k-1)为上 2.5 州 一时刻计算得到的误差协方差,X(k)为k时刻状态 n2.0 的最优估计值,P(k)为k时刻更新得到的误差协方 E1.5 差,K(k)为k时刻滤波器增益. 1.0H 3数值仿真 0.5 由于多AUV编队拓扑为动态拓扑,所以在 46810121416 t/s MATLAB仿真时,对于每一次采样都重新计算拉普 拉斯矩阵L(k)、系统矩阵A(k)和观测矩阵H(k). (a)原图 将相互有通信联系的智能体在拓扑矩阵中相应矩阵 元素置为1,失去联系的智能体其相应矩阵元素置 2.6 卡尔曼滤波 无滤波 为0,以表示时变矩阵。 设虚拟领航者方程为 2.4 xo(t)=[2(m/s)2(rad)2(rad)]T.(7) 取输出矩阵H=Ix,:W、V的协方差分别为Q= 2Ix7,R=2Ix仿真步长△T=0.1s.数值仿真结果如 图1~3所示. (b)局部放大图 图3领航者方程为式(7)时,滤波前后智能体1的速度 对比 Fig.3 Consensus on velocity of agent-1 with filtering Vs without filtering when the leader equation is Equ.(7) 46810立1416 设虚领航都方程为 图1领航者方程为式(7)时,7个智能体无滤波时的速 xo(t)=sin(@t)I3x3, (8) 度一致性 b。为常数矩阵,L(t)为时变拉普拉斯矩阵.则系统 Fig.I Consensus on velocity of 7 agents without filte- 方程的解为 ring when the leader equation is Equ.(7) X(t)=e(t)+boxo(t)d +W(t).所以得到离散形式的系统方程为 X(k + 1) = A(k)X(k) + u(k) + W(k), Z(k) = H(k)X(k) + V(k). (5) 对于系统方程(5),系统初始时刻的状态定义 为 Z(0)= X(0),X ^ (0)= X(0),对于采样次数 k = 1, 2,…,N,使用式(6)进行最优递推滤波,可得系统状 态最优估计值. X ^ - (k) = A(k)X ^ (k - 1) + u(k - 1), P - (k) = A(k)P(k - 1)A(k) T + Q, K(k) = P - (k)H(k) T (H(k)P - (k)H(k) T + R) -1 , X ^ (k) = X ^ - (k) + K(k)(Z(k) - H(k)X ^ - (k)), P(k) = (I - K(k)H(k))P - (k). (6) 式中:X ^ - (k)为 k 时刻使用系统状态方程对状态的 预测,X ^ ( k - 1) 为 k - 1 时刻状态的最优估计值, P - (k)为 k 时刻对误差协方差的预测,P( k-1)为上 一时刻计算得到的误差协方差,X ^ (k)为 k 时刻状态 的最优估计值,P(k)为 k 时刻更新得到的误差协方 差,K(k)为 k 时刻滤波器增益. 3 数值仿真 由于多 AUV 编队拓扑为动态拓扑, 所以在 MATLAB 仿真时,对于每一次采样都重新计算拉普 拉斯矩阵 L(k)、系统矩阵 A( k)和观测矩阵 H( k). 将相互有通信联系的智能体在拓扑矩阵中相应矩阵 元素置为 1,失去联系的智能体其相应矩阵元素置 为 0,以表示时变矩阵. 设虚拟领航者方程为 x0(t) = [2(m / s) 2(rad) 2(rad)] T . (7) 取输出矩阵 H= I7×7 ;W、V 的协方差分别为 Q = 2I7×7 ,R= 2I7×7 .仿真步长 ΔT = 0.1s.数值仿真结果如 图 1~3 所示. 图 1 领航者方程为式(7)时,7 个智能体无滤波时的速 度一致性 Fig.1 Consensus on velocity of 7 agents without filte⁃ ring when the leader equation is Equ.(7) 图 2 领航者方程为式(7)时,7 个智能体滤波后的速度 一致性 Fig.2 Consensus on velocity of 7 agents with Kalman filter when the leader equation is Equ.(7) (a)原图 (b)局部放大图 图 3 领航者方程为式(7)时,滤波前后智能体 1 的速度 对比 Fig.3 Consensus on velocity of agent⁃1 with filtering Vs without filtering when the leader equation is Equ.(7) 设虚领航都方程为 x0(t) = sin(ωt)I3×3 , (8) b0 为常数矩阵, L(t)为时变拉普拉斯矩阵.则系统 方程的解为 X(t) = e (L((t) -(I()(t-t0 )X(t 0 ) + ∫ t t0 b0 x0(t)dτ + W(t). ·346· 智 能 系 统 学 报 第 8 卷