正在加载图片...
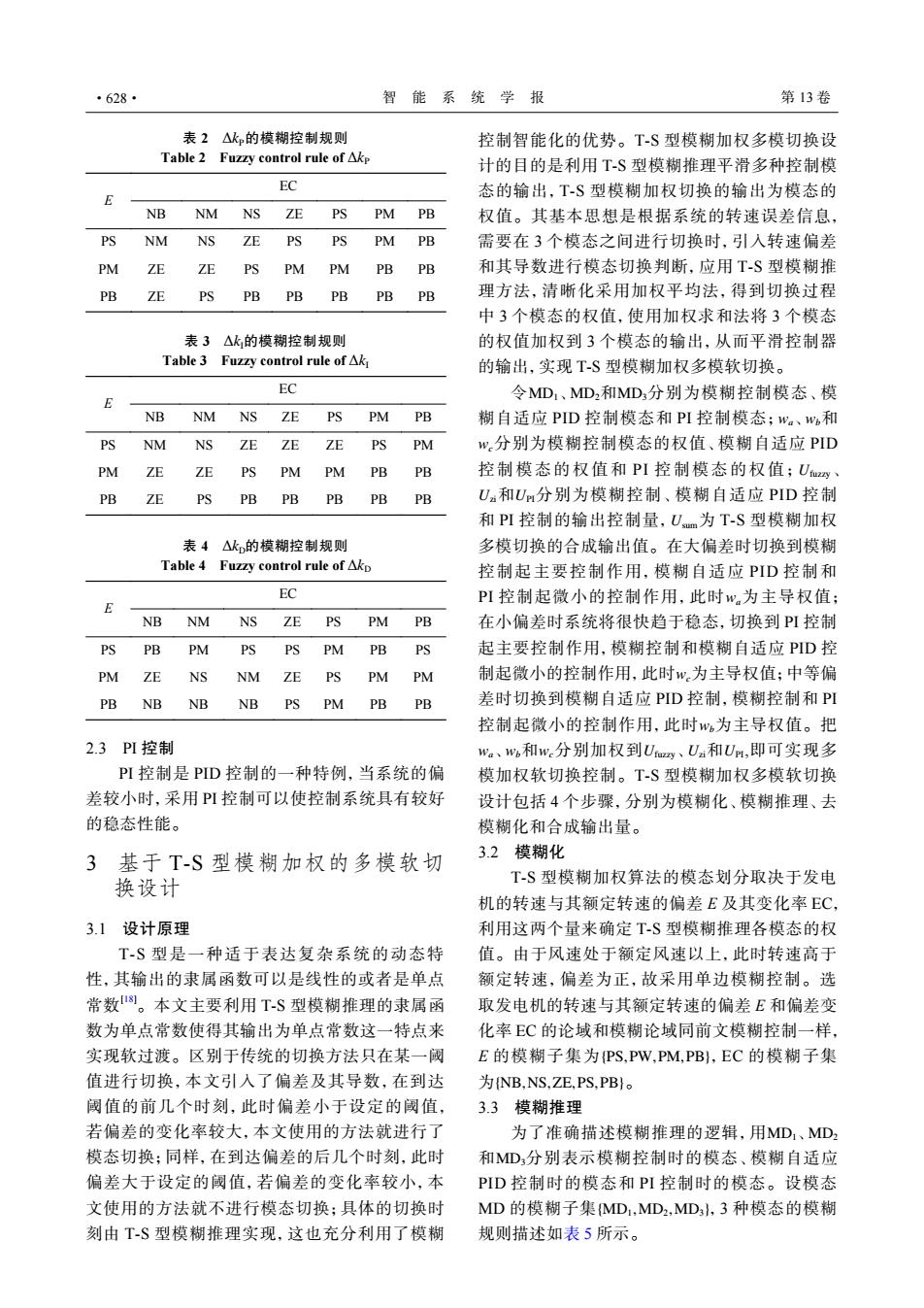
·628· 智能系统学报 第13卷 表2△k的模糊控制规则 控制智能化的优势。T-S型模糊加权多模切换设 Table 2 Fuzzy control rule of Akp 计的目的是利用T-S型模糊推理平滑多种控制模 EC 态的输出,T-S型模糊加权切换的输出为模态的 NB NM NS ZE PS PM PB 权值。其基本思想是根据系统的转速误差信息, PS NM Ns ZE PS PS PM PB 需要在3个模态之间进行切换时,引入转速偏差 PM ZE ZE PS PM PM PB PB 和其导数进行模态切换判断,应用T-S型模糊推 PB ZE PS PB PB PB PB PB 理方法,清晰化采用加权平均法,得到切换过程 中3个模态的权值,使用加权求和法将3个模态 表3△k的模糊控制规则 的权值加权到3个模态的输出,从而平滑控制器 Table 3 Fuzzy control rule of Ak 的输出,实现T-S型模糊加权多模软切换。 EC 令MD1、MD2和MD分别为模糊控制模态、模 E NB NM NS ZE PS PM PB 糊自适应PID控制模态和PI控制模态;wa、w和 PS NM NS ZE ZE ZE PS PM w分别为模糊控制模态的权值、模糊自适应PID PM ZE ZE PS PM PM PB PB 控制模态的权值和PI控制模态的权值;U四 PB ZE PS PB PB PB PB PB Ua和U分别为模糊控制、模糊自适应PID控制 和PI控制的输出控制量,Um为T-S型模糊加权 表4△的模糊控制规则 多模切换的合成输出值。在大偏差时切换到模糊 Table 4 Fuzzy control rule of Akp 控制起主要控制作用,模糊自适应PID控制和 EC PI控制起微小的控制作用,此时w为主导权值; E NB NM NS ZE PS PM PB 在小偏差时系统将很快趋于稳态,切换到PI控制 PS PB PM PS PS PM PB PS 起主要控制作用,模糊控制和模糊自适应PID控 PM ZE ns nm ze PS PM PM 制起微小的控制作用,此时w为主导权值;中等偏 PB NB NB NB PS PM PB PB 差时切换到模糊自适应PD控制,模糊控制和PI 控制起微小的控制作用,此时w为主导权值。把 2.3PI控制 wa、w%和we分别加权到Uy、Ua和Um,即可实现多 PI控制是PID控制的一种特例,当系统的偏 模加权软切换控制。T-S型模糊加权多模软切换 差较小时,采用PI控制可以使控制系统具有较好 设计包括4个步骤,分别为模糊化、模糊推理、去 的稳态性能。 模糊化和合成输出量。 3基于T-S型模糊加权的多模软切 3.2模糊化 换设计 T-S型模糊加权算法的模态划分取决于发电 机的转速与其额定转速的偏差E及其变化率EC, 3.1设计原理 利用这两个量来确定TS型模糊推理各模态的权 T-$型是一种适于表达复杂系统的动态特 值。由于风速处于额定风速以上,此时转速高于 性,其输出的隶属函数可以是线性的或者是单点 额定转速,偏差为正,故采用单边模糊控制。选 常数。本文主要利用T-S型模糊推理的隶属函 取发电机的转速与其额定转速的偏差E和偏差变 数为单点常数使得其输出为单点常数这一特点来 化率EC的论域和模糊论域同前文模糊控制一样, 实现软过渡。区别于传统的切换方法只在某一阈 E的模糊子集为PS,PW,PM,PB,EC的模糊子集 值进行切换,本文引入了偏差及其导数,在到达 为NB,NS,ZEPS,PB}。 阈值的前几个时刻,此时偏差小于设定的阈值, 3.3模糊推理 若偏差的变化率较大,本文使用的方法就进行了 为了准确描述模糊推理的逻辑,用MD1、MD2 模态切换;同样,在到达偏差的后几个时刻,此时 和MD,分别表示模糊控制时的模态、模糊自适应 偏差大于设定的阈值,若偏差的变化率较小,本 PID控制时的模态和PI控制时的模态。设模态 文使用的方法就不进行模态切换;具体的切换时 MD的模糊子集MD,MD2,MDl,3种模态的模糊 刻由T-S型模糊推理实现,这也充分利用了模糊 规则描述如表5所示。表 2 ∆kP的模糊控制规则 Table 2 Fuzzy control rule of ∆kP E EC NB NM NS ZE PS PM PB PS NM NS ZE PS PS PM PB PM ZE ZE PS PM PM PB PB PB ZE PS PB PB PB PB PB 表 ∆kI 3 的模糊控制规则 Table 3 Fuzzy control rule of ∆kI E EC NB NM NS ZE PS PM PB PS NM NS ZE ZE ZE PS PM PM ZE ZE PS PM PM PB PB PB ZE PS PB PB PB PB PB 表 4 ∆kD的模糊控制规则 Table 4 Fuzzy control rule of ∆kD E EC NB NM NS ZE PS PM PB PS PB PM PS PS PM PB PS PM ZE NS NM ZE PS PM PM PB NB NB NB PS PM PB PB 2.3 PI 控制 PI 控制是 PID 控制的一种特例,当系统的偏 差较小时,采用 PI 控制可以使控制系统具有较好 的稳态性能。 3 基于 T-S 型模糊加权的多模软切 换设计 3.1 设计原理 T-S 型是一种适于表达复杂系统的动态特 性,其输出的隶属函数可以是线性的或者是单点 常数[18]。本文主要利用 T-S 型模糊推理的隶属函 数为单点常数使得其输出为单点常数这一特点来 实现软过渡。区别于传统的切换方法只在某一阈 值进行切换,本文引入了偏差及其导数,在到达 阈值的前几个时刻,此时偏差小于设定的阈值, 若偏差的变化率较大,本文使用的方法就进行了 模态切换;同样,在到达偏差的后几个时刻,此时 偏差大于设定的阈值,若偏差的变化率较小,本 文使用的方法就不进行模态切换;具体的切换时 刻由 T-S 型模糊推理实现,这也充分利用了模糊 控制智能化的优势。T-S 型模糊加权多模切换设 计的目的是利用 T-S 型模糊推理平滑多种控制模 态的输出,T-S 型模糊加权切换的输出为模态的 权值。其基本思想是根据系统的转速误差信息, 需要在 3 个模态之间进行切换时,引入转速偏差 和其导数进行模态切换判断,应用 T-S 型模糊推 理方法,清晰化采用加权平均法,得到切换过程 中 3 个模态的权值,使用加权求和法将 3 个模态 的权值加权到 3 个模态的输出,从而平滑控制器 的输出,实现 T-S 型模糊加权多模软切换。 MD1 MD2 MD3 wa wb wc Ufuzzy Uzi UPI Usum wa wc wb wa wb wc Ufuzzy Uzi UPI 令 、 和 分别为模糊控制模态、模 糊自适应 PID 控制模态和 PI 控制模态; 、 和 分别为模糊控制模态的权值、模糊自适应 PID 控制模态的权值和 PI 控制模态的权值; 、 和 分别为模糊控制、模糊自适应 PID 控制 和 PI 控制的输出控制量, 为 T-S 型模糊加权 多模切换的合成输出值。在大偏差时切换到模糊 控制起主要控制作用,模糊自适应 PID 控制和 PI 控制起微小的控制作用,此时 为主导权值; 在小偏差时系统将很快趋于稳态,切换到 PI 控制 起主要控制作用,模糊控制和模糊自适应 PID 控 制起微小的控制作用,此时 为主导权值;中等偏 差时切换到模糊自适应 PID 控制,模糊控制和 PI 控制起微小的控制作用,此时 为主导权值。把 、 和 分别加权到 、 和 ,即可实现多 模加权软切换控制。T-S 型模糊加权多模软切换 设计包括 4 个步骤,分别为模糊化、模糊推理、去 模糊化和合成输出量。 3.2 模糊化 {PS,PW,PM,PB} {NB,NS,ZE,PS,PB} T-S 型模糊加权算法的模态划分取决于发电 机的转速与其额定转速的偏差 E 及其变化率 EC, 利用这两个量来确定 T-S 型模糊推理各模态的权 值。由于风速处于额定风速以上,此时转速高于 额定转速,偏差为正,故采用单边模糊控制。选 取发电机的转速与其额定转速的偏差 E 和偏差变 化率 EC 的论域和模糊论域同前文模糊控制一样, E 的模糊子集为 ,EC 的模糊子集 为 。 3.3 模糊推理 MD1 MD2 MD3 {MD1,MD2,MD3} 为了准确描述模糊推理的逻辑,用 、 和 分别表示模糊控制时的模态、模糊自适应 PID 控制时的模态和 PI 控制时的模态。设模态 MD 的模糊子集 ,3 种模态的模糊 规则描述如表 5 所示。 ·628· 智 能 系 统 学 报 第 13 卷