正在加载图片...
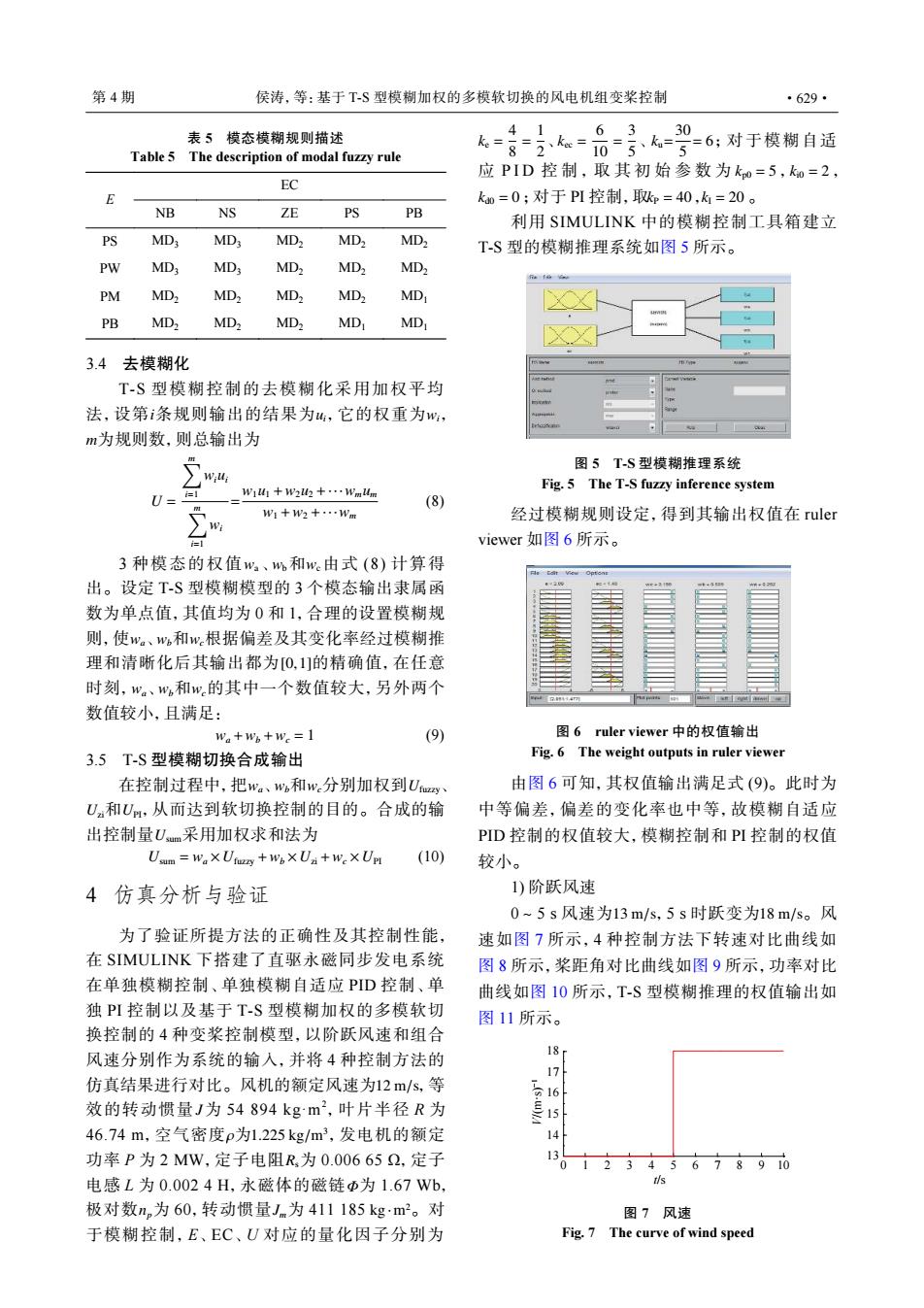
第4期 侯涛,等:基于TS型模糊加权的多模软切换的风电机组变桨控制 ·629· 表5模态模糊规则描述 Table 5 The description of modal fuzzy rule k-意分合-飞=碧6:对于模精自适 应PID控制,取其初始参数为ko=5,ko=2, EC E k0=0;对于PI控制,取=40,k=20。 NB NS ZE PS PB 利用SIMULINK中的模糊控制工具箱建立 PS MD: MD MD, MD MD2 T-S型的模糊推理系统如图5所示。 PW MD MD MD, MD, MD2 PM MD2 MD2 MD2 MD2 MD PB MD, MD, MD, MD MD 3.4 去模糊化 T-S型模糊控制的去模糊化采用加权平均 法,设第i条规则输出的结果为w,它的权重为, m为规则数,则总输出为 图5TS型模糊推理系统 W:u; w1山1+w2l2+…Wm4m Fig.5 The T-S fuzzy inference system (8) WI+w2+...Wm 经过模糊规则设定,得到其输出权值在ruler viewer如图6所示。 3种模态的权值w、wm和w由式(8)计算得 出。设定T-S型模糊模型的3个模态输出隶属函 数为单点值,其值均为0和1,合理的设置模糊规 则,使w。、w%和w根据偏差及其变化率经过模糊推 理和清晰化后其输出都为[0,1]的精确值,在任意 时刻,w。、w和w的其中一个数值较大,另外两个 数值较小,且满足: Wa+w+w=1 (9) 图6 ruler viewer中的权值输出 3.5T-S型模糊切换合成输出 Fig.6 The weight outputs in ruler viewer 在控制过程中,把wa、w和w.分别加权到Uy、 由图6可知,其权值输出满足式(9)。此时为 U和U,从而达到软切换控制的目的。合成的输 中等偏差,偏差的变化率也中等,故模糊自适应 出控制量Uum采用加权求和法为 PID控制的权值较大,模糊控制和PI控制的权值 Uum=wa×Uig+w%×Ua+w.×Un (10) 较小。 4仿真分析与验证 1)阶跃风速 0~5s风速为13m/s,5s时跃变为18m/s。风 为了验证所提方法的正确性及其控制性能, 速如图7所示,4种控制方法下转速对比曲线如 在SIMULINK下搭建了直驱永磁同步发电系统 图8所示,桨距角对比曲线如图9所示,功率对比 在单独模糊控制、单独模糊自适应PD控制、单 曲线如图10所示,T-S型模糊推理的权值输出如 独PI控制以及基于T-S型模糊加权的多模软切 图11所示。 换控制的4种变桨控制模型,以阶跃风速和组合 风速分别作为系统的输入,并将4种控制方法的 18 17 仿真结果进行对比。风机的额定风速为12m/s,等 效的转动惯量J为54894kgm2,叶片半径R为 46.74m,空气密度p为1.225kg/m3,发电机的额定 功率P为2MW,定子电阻R为0.006652,定子 1 012345678910 电感L为0.0024H,永磁体的磁链Φ为1.67Wb, t/s 极对数n,为60,转动惯量Jm为411185kgm2。对 图7风速 于模糊控制,E、EC、U对应的量化因子分别为 Fig.7 The curve of wind speed表 5 模态模糊规则描述 Table 5 The description of modal fuzzy rule E EC NB NS ZE PS PB PS MD3 MD3 MD2 MD2 MD2 PW MD3 MD3 MD2 MD2 MD2 PM MD2 MD2 MD2 MD2 MD1 PB MD2 MD2 MD2 MD1 MD1 3.4 去模糊化 i ui wi m T-S 型模糊控制的去模糊化采用加权平均 法,设第 条规则输出的结果为 ,它的权重为 , 为规则数,则总输出为 U = ∑m i=1 wiui ∑m i=1 wi = w1u1 +w2u2 +···wmum w1 +w2 +···wm (8) wa wb wc wa wb wc [0,1] wa wb wc 3 种模态的权值 、 和 由式 (8) 计算得 出。设定 T-S 型模糊模型的 3 个模态输出隶属函 数为单点值,其值均为 0 和 1,合理的设置模糊规 则,使 、 和 根据偏差及其变化率经过模糊推 理和清晰化后其输出都为 的精确值,在任意 时刻, 、 和 的其中一个数值较大,另外两个 数值较小,且满足: wa +wb +wc = 1 (9) 3.5 T-S 型模糊切换合成输出 wa wb wc Ufuzzy Uzi UPI Usum 在控制过程中,把 、 和 分别加权到 、 和 ,从而达到软切换控制的目的。合成的输 出控制量 采用加权求和法为 Usum = wa ×Ufuzzy +wb ×Uzi +wc ×UPI (10) 4 仿真分析与验证 12 m/s J ρ 1.225 kg/m3 Rs Φ np Jm kg ·m2 为了验证所提方法的正确性及其控制性能, 在 SIMULINK 下搭建了直驱永磁同步发电系统 在单独模糊控制、单独模糊自适应 PID 控制、单 独 PI 控制以及基于 T-S 型模糊加权的多模软切 换控制的 4 种变桨控制模型,以阶跃风速和组合 风速分别作为系统的输入,并将 4 种控制方法的 仿真结果进行对比。风机的额定风速为 ,等 效的转动惯量 为 54 894 kg·m2 ,叶片半径 R 为 46.74 m,空气密度 为 ,发电机的额定 功率 P 为 2 MW,定子电阻 为 0.006 65 Ω,定子 电感 L 为 0.002 4 H,永磁体的磁链 为 1.67 Wb, 极对数 为 60,转动惯量 为 411 185 。对 于模糊控制,E、EC、U 对应的量化因子分别为 ke = 4 8 = 1 2 kec = 6 10 = 3 5 ku= 30 5 = 6 kp0 = 5 ki0 = 2 kd0 = 0 kP = 40 kI = 20 、 、 ;对于模糊自适 应 P I D 控制,取其初始参数为 , , ;对于 PI 控制,取 , 。 利用 SIMULINK 中的模糊控制工具箱建立 T-S 型的模糊推理系统如图 5 所示。 图 5 T-S 型模糊推理系统 Fig. 5 The T-S fuzzy inference system 经过模糊规则设定,得到其输出权值在 ruler viewer 如图 6 所示。 图 6 ruler viewer 中的权值输出 Fig. 6 The weight outputs in ruler viewer 由图 6 可知,其权值输出满足式 (9)。此时为 中等偏差,偏差的变化率也中等,故模糊自适应 PID 控制的权值较大,模糊控制和 PI 控制的权值 较小。 1) 阶跃风速 0~5 s 风速为 13 m/s,5 s 时跃变为 18 m/s 。风 速如图 7 所示,4 种控制方法下转速对比曲线如 图 8 所示,桨距角对比曲线如图 9 所示,功率对比 曲线如图 10 所示,T-S 型模糊推理的权值输出如 图 11 所示。 0 1 2 3 4 5 6 7 8 9 10 13 14 15 16 17 18 V/(m·s)−1 t/s 图 7 风速 Fig. 7 The curve of wind speed 第 4 期 侯涛,等:基于 T-S 型模糊加权的多模软切换的风电机组变桨控制 ·629·