正在加载图片...
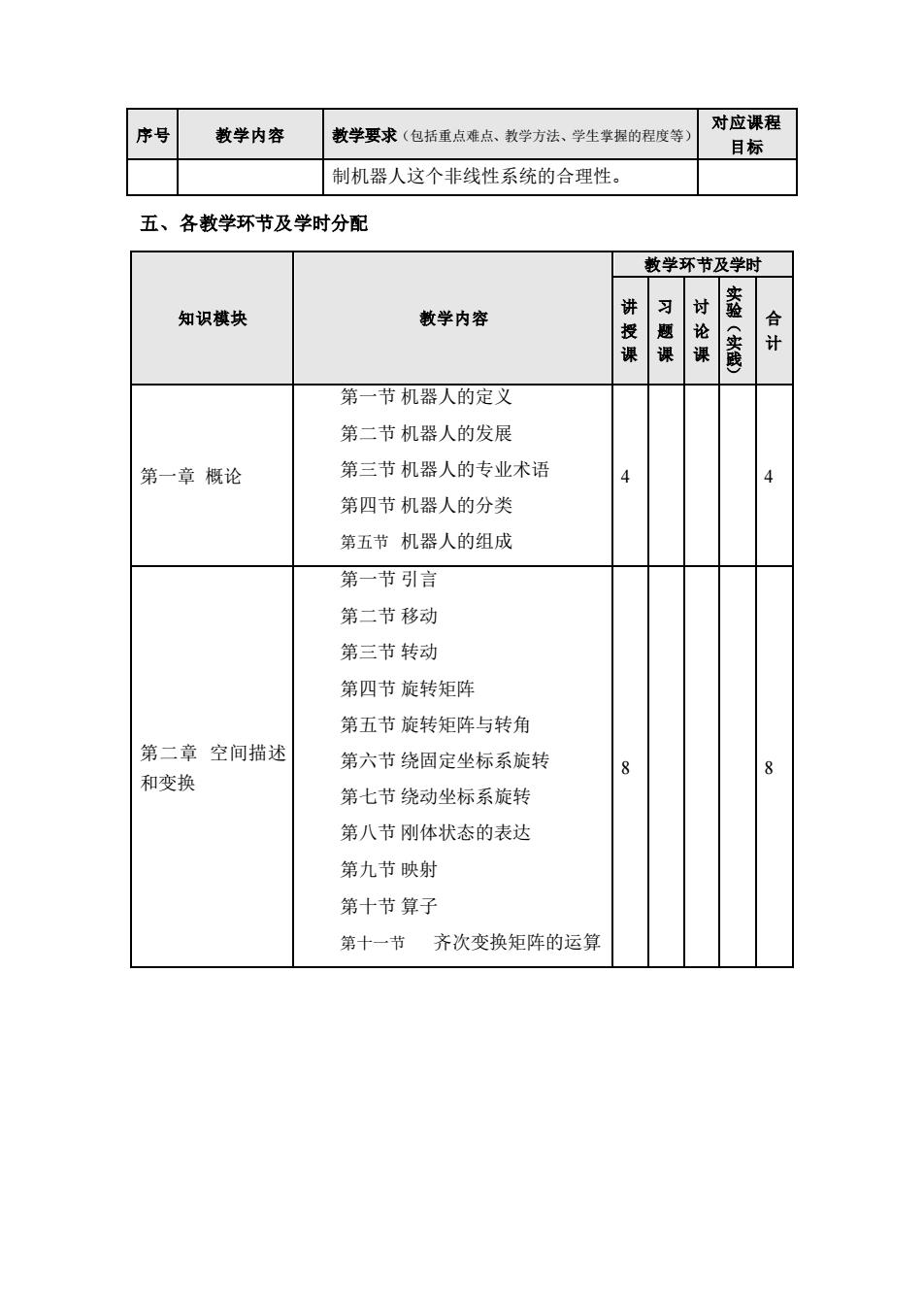
对应课程 序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 目标 制机器人这个非线性系统的合理性。 五、各教学环节及学时分配 教学环节及学时 知识棋块 教学内容 讲 习 课 课 讨论 实验(实哦) 命 第一节机器人的定义 第二节机器人的发展 第一章概论 第三节机器人的专业术语 4 4 第四节机器人的分类 第五节机器人的组成 第一节引言 第二节移动 第三节转动 第四节旋转矩阵 第五节旋转矩阵与转角 第二章空间描述 第六节绕固定坐标系旋转 8 8 和变换 第七节绕动坐标系旋转 第八节刚体状态的表达 第九节映射 第十节算子 第十一节齐次变换矩阵的运算序号 教学内容 教学要求(包括重点难点、教学方法、学生掌握的程度等) 对应课程 目标 制机器人这个非线性系统的合理性。 五、各教学环节及学时分配 知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第一章 概论 第一节 机器人的定义 第二节 机器人的发展 第三节 机器人的专业术语 第四节 机器人的分类 第五节 机器人的组成 4 4 第二章 空间描述 和变换 第一节 引言 第二节 移动 第三节 转动 第四节 旋转矩阵 第五节 旋转矩阵与转角 第六节 绕固定坐标系旋转 第七节 绕动坐标系旋转 第八节 刚体状态的表达 第九节 映射 第十节 算子 第十一节 齐次变换矩阵的运算 8 8