正在加载图片...
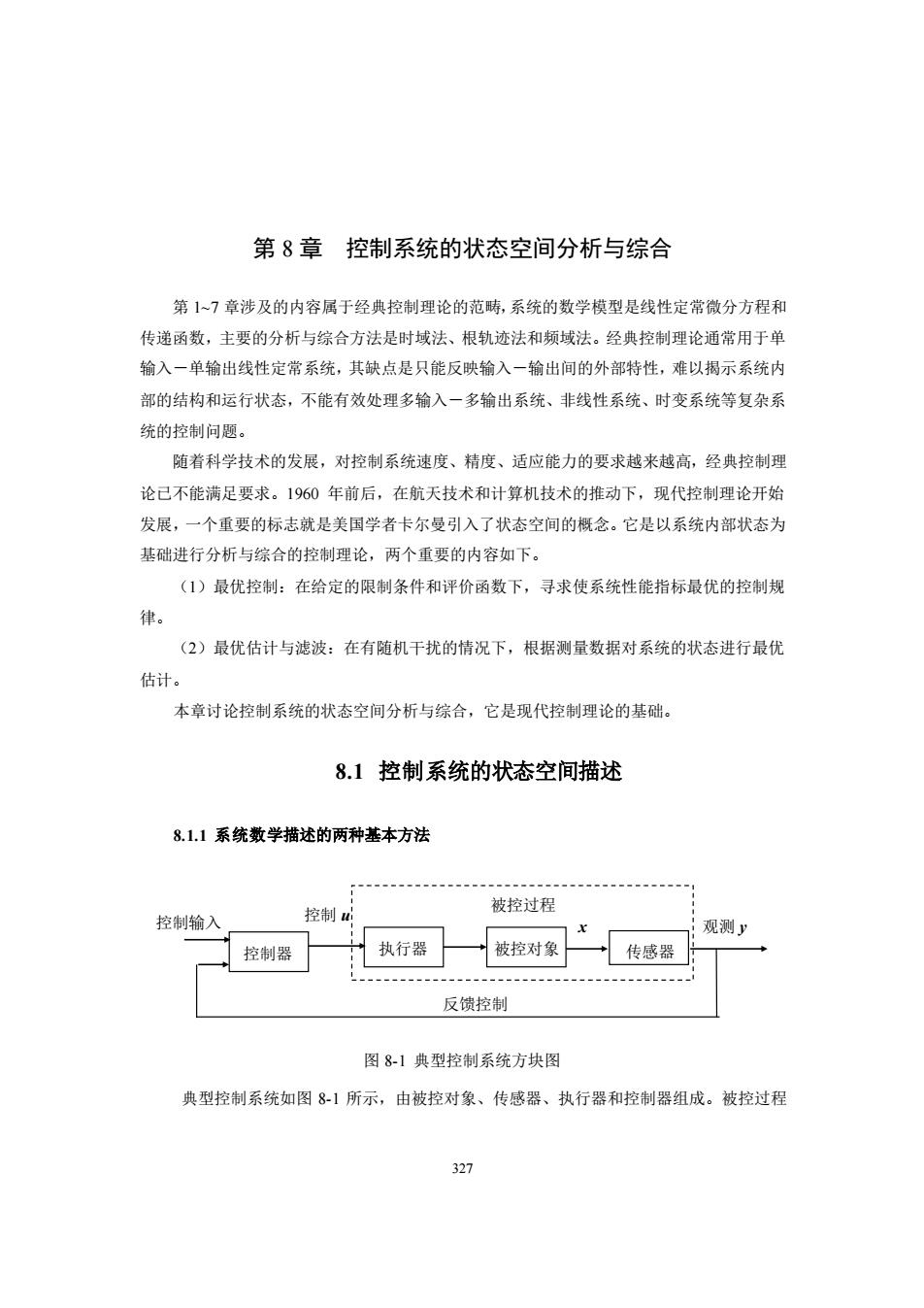
第8章控制系统的状态空间分析与综合 第1~7章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和 传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。经典控制理论通常用于单 输入一单输出线性定常系统,其缺点是只能反映输入一输出间的外部特性,难以揭示系统内 部的结构和运行状态,不能有效处理多输入一多输出系统、非线性系统、时变系统等复杂系 统的控制问题。 随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理 论已不能满足要求。1960年前后,在航天技术和计算机技术的推动下,现代控制理论开始 发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。它是以系统内部状态为 基础进行分析与综合的控制理论,两个重要的内容如下。 ()最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规 律。 (2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优 估计。 本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。 8.1控制系统的状态空间描述 81.1系统数学描述的两种基本方法 控制 被控过程 控制输入 观测y 控制器 执行器 被控对象 +传感器 反馈控制 图8-1典型控制系统方块图 典型控制系统如图&1所示,由被控对象、传感器、执行器和控制器组成。被控过程 327 327 第 8 章 控制系统的状态空间分析与综合 第 1~7 章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和 传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。经典控制理论通常用于单 输入-单输出线性定常系统,其缺点是只能反映输入-输出间的外部特性,难以揭示系统内 部的结构和运行状态,不能有效处理多输入-多输出系统、非线性系统、时变系统等复杂系 统的控制问题。 随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理 论已不能满足要求。1960 年前后,在航天技术和计算机技术的推动下,现代控制理论开始 发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。它是以系统内部状态为 基础进行分析与综合的控制理论,两个重要的内容如下。 (1)最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规 律。 (2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优 估计。 本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。 8.1 控制系统的状态空间描述 8.1.1 系统数学描述的两种基本方法 图 8-1 典型控制系统方块图 典型控制系统如图 8-1 所示,由被控对象、传感器、执行器和控制器组成。被控过程 控制 u 控制器 执行器 被控对象 传感器 控制输入 观测 y 被控过程 x 反馈控制