正在加载图片...
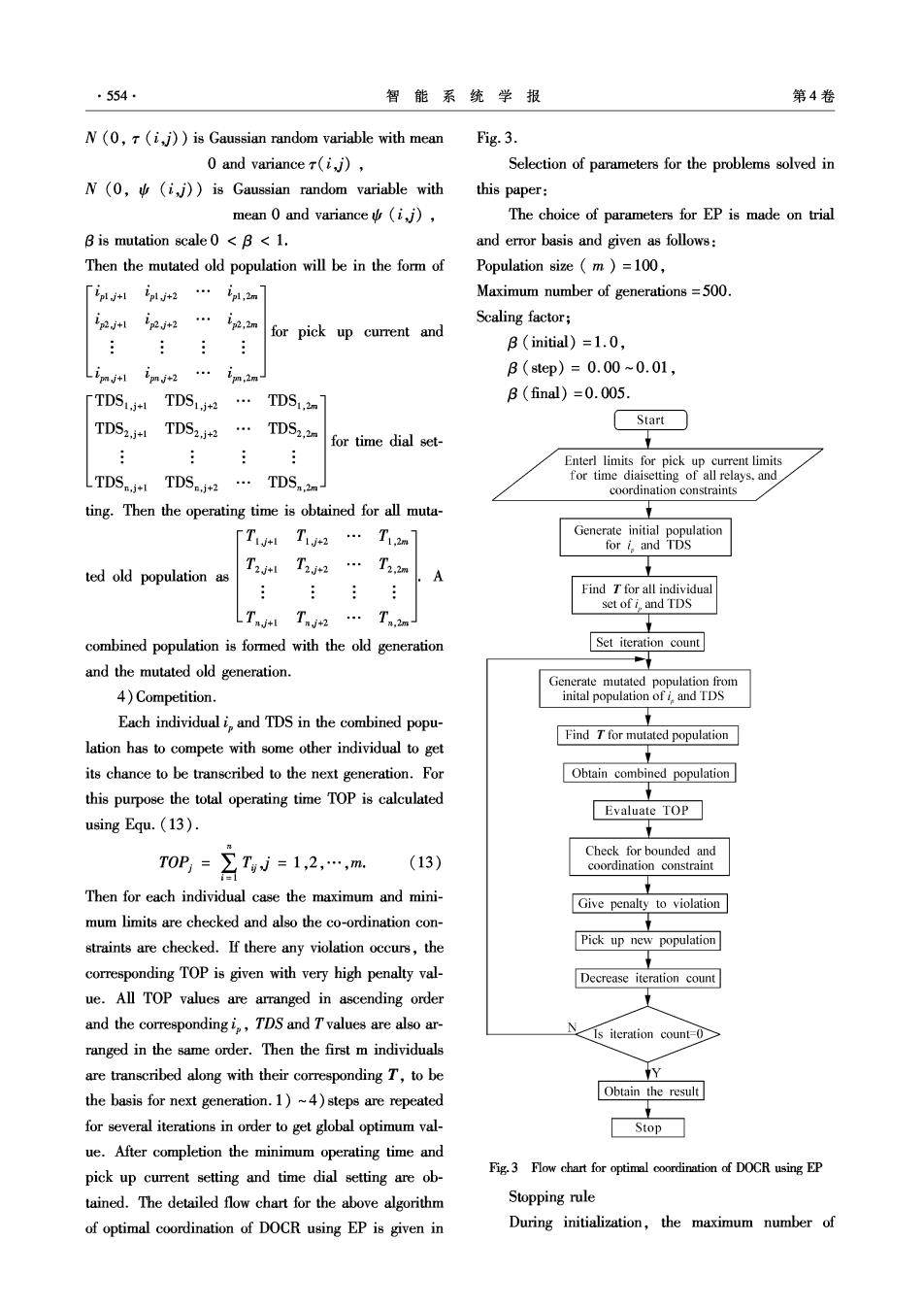
·554, 智能系统学报 第4卷 N(0,T (i,j))is Gaussian random variable with mean Fig.3. 0 and variancer(ij), Selection of parameters for the problems solved in N(0,(i,j))is Gaussian random variable with this paper: mean 0 and variance (i,j), The choice of parameters for EP is made on trial B is mutation scale 0 <B<1. and error basis and given as follows: Then the mutated old population will be in the form of Population size m )=100, 「ipljt ipjt2…pl,2n Maximum number of generations=500. ipjtl ipj2 i2,2m Scaling factor; for pick up current and B (initial)=1.0, Limjtl im*2… im.2m B(step)=0.00~0.01, [TDSi+ TDS1.+2 TDS1.m B(final)=0.005. TDS2.TDS2 TDS2.2m Start for time dial set- Enterl limits for pick up current limits LTDS.+ TDS.+2 TDS.2m- for time diaisetting of all relays,and coordination constraints ting.Then the operating time is obtained for all muta- [Ti T12 … T1.2m Generate initial population for i and TDS ted old population as T2*1 T2*2 …T2.2m A Find T for all individual set of i,and TDS LTnjtt TnN2… Tn2m combined population is formed with the old generation Set iteration count and the mutated old generation. Generate mutated population from 4)Competition. inital population of i,and TDS Each individual i,and TDS in the combined popu- Find T for mutated population lation has to compete with some other individual to get its chance to be transcribed to the next generation.For Obtain combined population this purpose the total operating time TOP is calculated Evaluate TOP using Equ.(13). Check for bounded and T0P=7W=1,2…,m (13) coordination constraint Then for each individual case the maximum and mini- Give penalty to violation mum limits are checked and also the co-ordination con- straints are checked.If there any violation occurs,the Pick up new population corresponding TOP is given with very high penalty val- Decrease iteration count ue.All TOP values are arranged in ascending order and the correspondingi,TDS and Tvalues are also ar- N Is iteration count-0 ranged in the same order.Then the first m individuals are transcribed along with their corresponding T,to be y the basis for next generation.1)~4)steps are repeated Obtain the result for several iterations in order to get global optimum val- Stop ue.After completion the minimum operating time and pick up current setting and time dial setting are ob- Fig.3 Flow chart for optimal coordination of DOCR using EP tained.The detailed flow chart for the above algorithm Stopping rule of optimal coordination of DOCR using EP is given in During initialization,the maximum number of