正在加载图片...
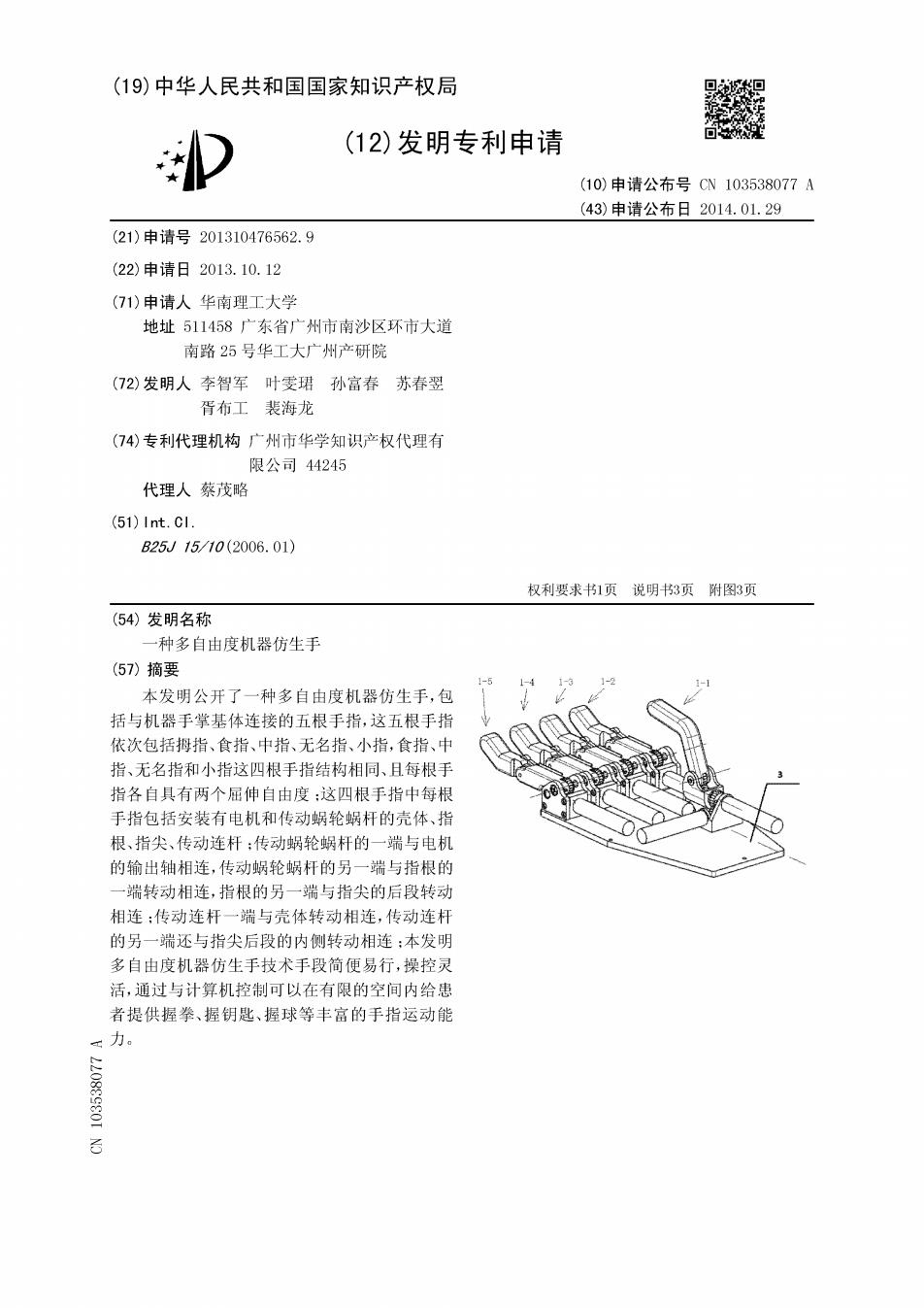
(19)中华人民共和国国家知识产权局 ▣口 (12)发明专利申请 (10)申请公布号CN103538077A (43)申请公布日2014.01.29 (21)申请号201310476562.9 (22)申请日2013.10.12 (71)申请人华南理工大学 地址511458广东省广州市南沙区环市大道 南路25号华工大广州产研院 (72)发明人李智军叶雯珺孙富春苏春翌 胥布工裴海龙 (74)专利代理机构广州市华学知识产权代理有 限公司44245 代理人蔡茂略 (51)1nt.cl. B25J15/10(2006.01) 权利要求书1页说明书3页附图3页 (54)发明名称 种多自由度机器仿生手 (57)摘要 1-5 1-1 本发明公开了一种多自由度机器仿生手,包 括与机器手掌基体连接的五根手指,这五根手指 依次包括拇指、食指、中指、无名指、小指,食指、中 指、无名指和小指这四根手指结构相同、且每根手 指各自具有两个屈伸自由度:这四根手指中每根 手指包括安装有电机和传动蜗轮蜗杆的壳体、指 根、指尖、传动连杆:传动蜗轮蜗杆的一端与电机 的输出轴相连,传动蜗轮蜗杆的另一端与指根的 一端转动相连,指根的另一端与指尖的后段转动 相连:传动连杆一端与壳体转动相连,传动连杆 的另一端还与指尖后段的内侧转动相连:本发明 多自由度机器仿生手技术手段简便易行,操控灵 活,通过与计算机控制可以在有限的空间内给患 者提供握拳、握钥匙、握球等丰富的手指运动能 x力