正在加载图片...
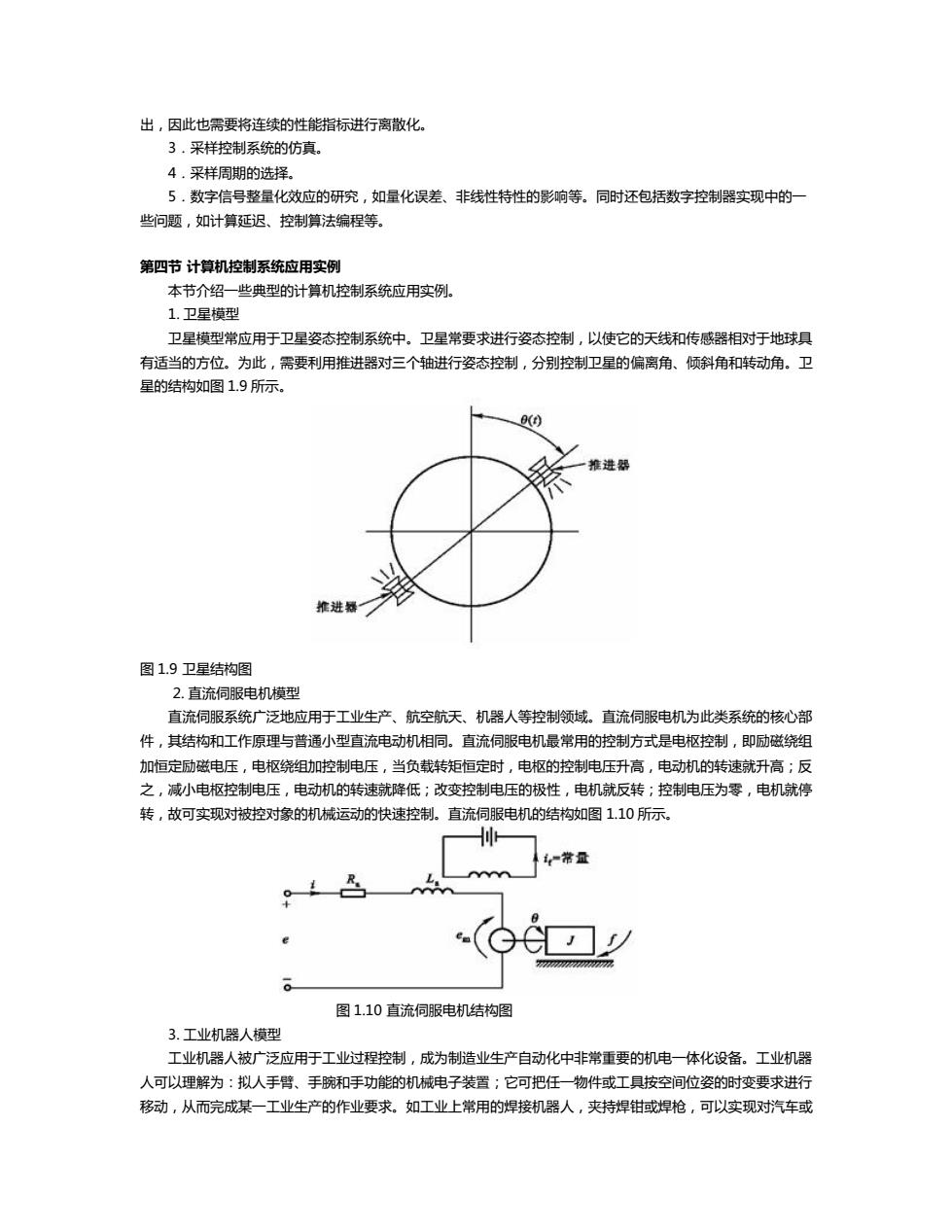
出,因此也需要将连续的性能指标进行离散化。 3.采样控制系统的仿真。 4.采样周期的选择。 5.数字信号整量化效应的研究,如量化误差、非线性特性的影响等。同时还包括数字控制器实现中的一 些问题,如计算延迟、控制算法编程等。 第四节计算机控制系统应用实例 本节介绍一些典型的计算机控制系统应用实例。 1.卫星模型 卫星模型常应用于卫星姿态控制系统中。卫星常要求进行姿态控制,以使它的天线和传感器相对于地球具 有适当的方位。为此,需要利用推进器对三个轴进行姿态控制,分别控制卫星的偏离角、倾斜角和转动角。卫 星的结构如图1.9所示。 推进器 推进暴 图1.9卫星结构图 2.直流伺服电机模型 直流伺服系统广泛地应用于工业生产、航空航天、机器人等控制领域。直流伺服电机为此类系统的核心部 件,其结构和工作原理与普通小型直流电动机相同。直流伺服电机最常用的控制方式是电枢控制,即励磁绕组 加恒定励磁电压,电枢绕组加控制电压,当负载转矩恒定时,电枢的控制电压升高,电动机的转速就升高;反 之,减小电枢控制电压,电动机的转速就降低:改变控制电压的极性,电机就反转;控制电压为零,电机就停 转,故可实现对被控对像的机械运动的快速控制。直流伺服电机的结构如图1.10所示。 ,=常员 (GC 图1.10直流伺服电机结构图 3.工业机器人模型 工业机器人被广泛应用于工业过程控制,成为制造业生产自动化中非常重要的机电一体化设备。工业机器 人可以理解为:拟人手臂、手腕和手功能的机械电子装置;它可把任一物件或工具按空间位姿的时变要求进行 移动,从而完成某一工业生产的作业要求。如工业上常用的焊接机器人,夹持焊钳或焊枪,可以实现对汽车或出,因此也需要将连续的性能指标进行离散化。 3.采样控制系统的仿真。 4.采样周期的选择。 5.数字信号整量化效应的研究,如量化误差、非线性特性的影响等。同时还包括数字控制器实现中的一 些问题,如计算延迟、控制算法编程等。 第四节 计算机控制系统应用实例 本节介绍一些典型的计算机控制系统应用实例。 1. 卫星模型 卫星模型常应用于卫星姿态控制系统中。卫星常要求进行姿态控制,以使它的天线和传感器相对于地球具 有适当的方位。为此,需要利用推进器对三个轴进行姿态控制,分别控制卫星的偏离角、倾斜角和转动角。卫 星的结构如图 1.9 所示。 图 1.9 卫星结构图 2. 直流伺服电机模型 直流伺服系统广泛地应用于工业生产、航空航天、机器人等控制领域。直流伺服电机为此类系统的核心部 件,其结构和工作原理与普通小型直流电动机相同。直流伺服电机最常用的控制方式是电枢控制,即励磁绕组 加恒定励磁电压,电枢绕组加控制电压,当负载转矩恒定时,电枢的控制电压升高,电动机的转速就升高;反 之,减小电枢控制电压,电动机的转速就降低;改变控制电压的极性,电机就反转;控制电压为零,电机就停 转,故可实现对被控对象的机械运动的快速控制。直流伺服电机的结构如图 1.10 所示。 图 1.10 直流伺服电机结构图 3. 工业机器人模型 工业机器人被广泛应用于工业过程控制,成为制造业生产自动化中非常重要的机电一体化设备。工业机器 人可以理解为:拟人手臂、手腕和手功能的机械电子装置;它可把任一物件或工具按空间位姿的时变要求进行 移动,从而完成某一工业生产的作业要求。如工业上常用的焊接机器人,夹持焊钳或焊枪,可以实现对汽车或