正在加载图片...
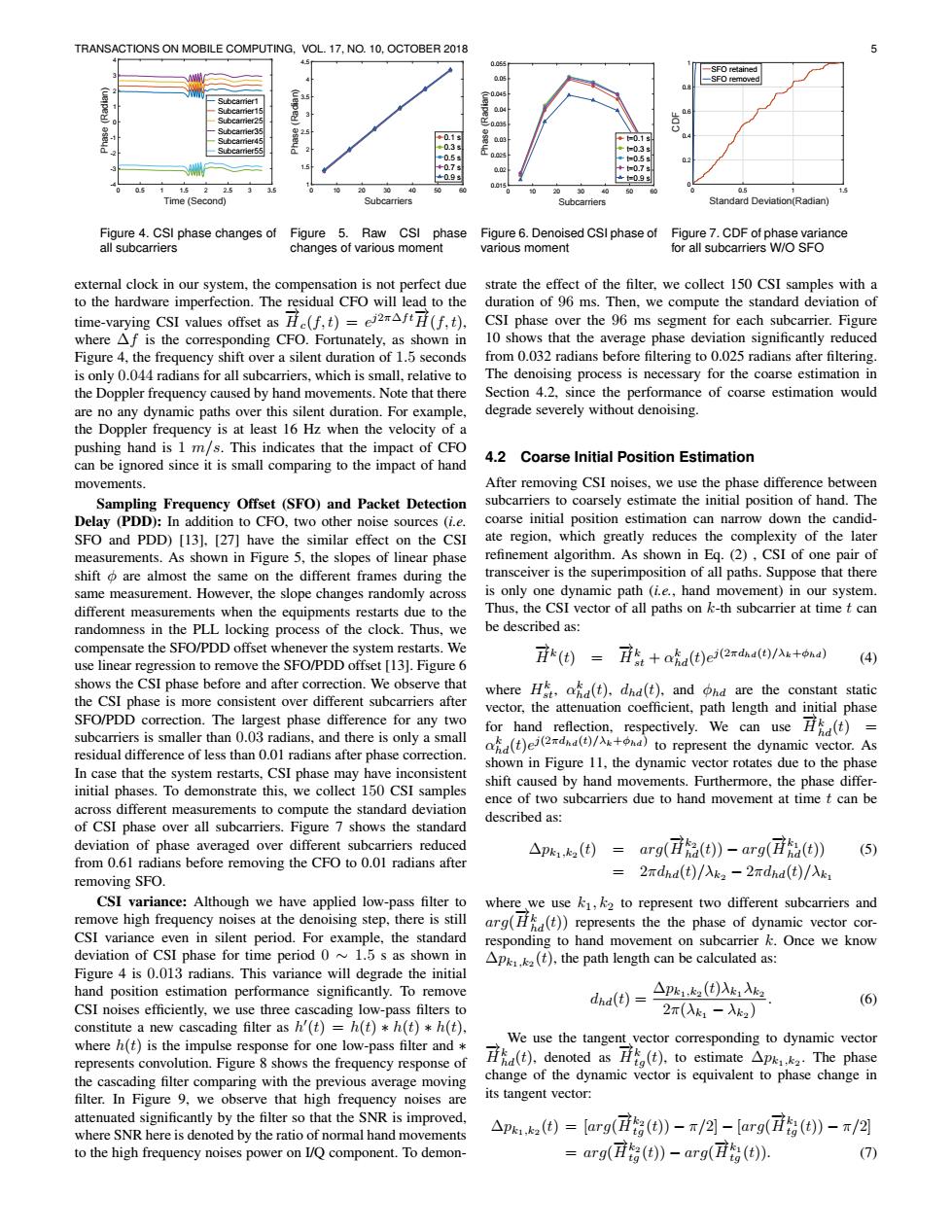
TRANSACTIONS ON MOBILE COMPUTING,VOL.17,NO.10,OCTOBER 2018 451 -SFO retained 09 09 15 2 25 20 30 40 50 30 50 05 Time (Second) Subcarrier Subcarriers Standard Deviation(Radian) Figure 4.CSI phase changes of Figure 5.Raw CSI phase Figure 6.Denoised CSI phase of Figure 7.CDF of phase variance all subcarriers changes of various moment various moment for all subcarriers W/O SFO external clock in our system,the compensation is not perfect due strate the effect of the filter,we collect 150 CSI samples with a to the hardware imperfection.The residual CFO will lead to the duration of 96 ms.Then,we compute the standard deviation of time-varying CSI values offset as He(f,t)=(f,t). CSI phase over the 96 ms segment for each subcarrier.Figure where Af is the corresponding CFO.Fortunately,as shown in 10 shows that the average phase deviation significantly reduced Figure 4,the frequency shift over a silent duration of 1.5 seconds from 0.032 radians before filtering to 0.025 radians after filtering. is only 0.044 radians for all subcarriers,which is small,relative to The denoising process is necessary for the coarse estimation in the Doppler frequency caused by hand movements.Note that there Section 4.2,since the performance of coarse estimation would are no any dynamic paths over this silent duration.For example, degrade severely without denoising the Doppler frequency is at least 16 Hz when the velocity of a pushing hand is 1 m/s.This indicates that the impact of CFO can be ignored since it is small comparing to the impact of hand 4.2 Coarse Initial Position Estimation movements. After removing CSI noises,we use the phase difference between Sampling Frequency Offset(SFO)and Packet Detection subcarriers to coarsely estimate the initial position of hand.The Delay (PDD):In addition to CFO,two other noise sources (i.e. coarse initial position estimation can narrow down the candid- SFO and PDD)[13].[27]have the similar effect on the CSI ate region,which greatly reduces the complexity of the later measurements.As shown in Figure 5,the slopes of linear phase refinement algorithm.As shown in Eg.(2),CSI of one pair of shift are almost the same on the different frames during the transceiver is the superimposition of all paths.Suppose that there same measurement.However,the slope changes randomly across is only one dynamic path (i.e.,hand movement)in our system. different measurements when the equipments restarts due to the Thus,the CSI vector of all paths on k-th subcarrier at time t can randomness in the PLL locking process of the clock.Thus,we be described as: compensate the SFO/PDD offset whenever the system restarts.We use linear regression to remove the SFO/PDD offset [13].Figure 6 (t)=+aa(t)ej(2xdna()/A+ha) (4) shows the CSI phase before and after correction.We observe that where Hk,af(t).dnd(t).and ohd are the constant static the CSI phase is more consistent over different subcarriers after vector,the attenuation coefficient,path length and initial phase SFO/PDD correction.The largest phase difference for any two subcarriers is smaller than 0.03 radians,and there is only a small for hand reflection,respectively.We can use(t) residual difference of less than 0.01 radians after phase correction. (t)/)to represent the dynamic vector.As shown in Figure 11,the dynamic vector rotates due to the phase In case that the system restarts,CSI phase may have inconsistent initial phases.To demonstrate this,we collect 150 CSI samples shift caused by hand movements.Furthermore,the phase differ- ence of two subcarriers due to hand movement at time t can be across different measurements to compute the standard deviation described as: of CSI phase over all subcarriers.Figure 7 shows the standard deviation of phase averaged over different subcarriers reduced Apki,ka (t)=arg((t))-arg(()) (5) from 0.61 radians before removing the CFO to 0.01 radians after removing SFO. 2dhd(t)/XK2 -2ndhd(t)/Xk CSI variance:Although we have applied low-pass filter to where we use k,2 to represent two different subcarriers and remove high frequency noises at the denoising step,there is still arg((t))represents the the phase of dynamic vector cor- CSI variance even in silent period.For example,the standard responding to hand movement on subcarrier k.Once we know deviation of CSI phase for time period 01.5 s as shown in Ap(t),the path length can be calculated as: Figure 4 is 0.013 radians.This variance will degrade the initial hand position estimation performance significantly.To remove △Pk1k2(t)入k1入k2 (6) CSI noises efficiently,we use three cascading low-pass filters to dhd(t)= 2r(Ak1-入k2) constitute a new cascading filter as h'(t)=h(t)*h(t)*h(t), where h(t)is the impulse response for one low-pass filter and We use the tangent vector corresponding to dynamic vector represents convolution.Figure 8 shows the frequency response of (t).denoted as(t).to estimate pk The phase the cascading filter comparing with the previous average moving change of the dynamic vector is equivalent to phase change in filter.In Figure 9,we observe that high frequency noises are its tangent vector: attenuated significantly by the filter so that the SNR is improved, where SNR here is denoted by the ratio of normal hand movements △pk,k2()=【arg(ig(t)-元/2-[arg(i()-π/2A to the high frequency noises power on I/Q component.To demon- -arg(i好()-arg(() (7)TRANSACTIONS ON MOBILE COMPUTING, VOL. 17, NO. 10, OCTOBER 2018 5 0 0.5 1 1.5 2 2.5 3 3.5 Time (Second) -4 -3 -2 -1 0 1 2 3 4 Phase (Radian) Subcarrier1 Subcarrier15 Subcarrier25 Subcarrier35 Subcarrier45 Subcarrier55 Figure 4. CSI phase changes of all subcarriers 0 10 20 30 40 50 60 Subcarriers 1 1.5 2 2.5 3 3.5 4 4.5 Phase (Radian) 0.1 s 0.3 s 0.5 s 0.7 s 0.9 s Figure 5. Raw CSI phase changes of various moment 0 10 20 30 40 50 60 Subcarriers 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05 0.055 Phase (Radian) t=0.1 s t=0.3 s t=0.5 s t=0.7 s t=0.9 s Figure 6. Denoised CSI phase of various moment 0 0.5 1 1.5 Standard Deviation(Radian) 0 0.2 0.4 0.6 0.8 1 CDF SFO retained SFO removed Figure 7. CDF of phase variance for all subcarriers W/O SFO external clock in our system, the compensation is not perfect due to the hardware imperfection. The residual CFO will lead to the time-varying CSI values offset as −→Hc(f, t) = e j2π∆f t−→H(f, t), where ∆f is the corresponding CFO. Fortunately, as shown in Figure 4, the frequency shift over a silent duration of 1.5 seconds is only 0.044 radians for all subcarriers, which is small, relative to the Doppler frequency caused by hand movements. Note that there are no any dynamic paths over this silent duration. For example, the Doppler frequency is at least 16 Hz when the velocity of a pushing hand is 1 m/s. This indicates that the impact of CFO can be ignored since it is small comparing to the impact of hand movements. Sampling Frequency Offset (SFO) and Packet Detection Delay (PDD): In addition to CFO, two other noise sources (i.e. SFO and PDD) [13], [27] have the similar effect on the CSI measurements. As shown in Figure 5, the slopes of linear phase shift φ are almost the same on the different frames during the same measurement. However, the slope changes randomly across different measurements when the equipments restarts due to the randomness in the PLL locking process of the clock. Thus, we compensate the SFO/PDD offset whenever the system restarts. We use linear regression to remove the SFO/PDD offset [13]. Figure 6 shows the CSI phase before and after correction. We observe that the CSI phase is more consistent over different subcarriers after SFO/PDD correction. The largest phase difference for any two subcarriers is smaller than 0.03 radians, and there is only a small residual difference of less than 0.01 radians after phase correction. In case that the system restarts, CSI phase may have inconsistent initial phases. To demonstrate this, we collect 150 CSI samples across different measurements to compute the standard deviation of CSI phase over all subcarriers. Figure 7 shows the standard deviation of phase averaged over different subcarriers reduced from 0.61 radians before removing the CFO to 0.01 radians after removing SFO. CSI variance: Although we have applied low-pass filter to remove high frequency noises at the denoising step, there is still CSI variance even in silent period. For example, the standard deviation of CSI phase for time period 0 ∼ 1.5 s as shown in Figure 4 is 0.013 radians. This variance will degrade the initial hand position estimation performance significantly. To remove CSI noises efficiently, we use three cascading low-pass filters to constitute a new cascading filter as h 0 (t) = h(t) ∗ h(t) ∗ h(t), where h(t) is the impulse response for one low-pass filter and ∗ represents convolution. Figure 8 shows the frequency response of the cascading filter comparing with the previous average moving filter. In Figure 9, we observe that high frequency noises are attenuated significantly by the filter so that the SNR is improved, where SNR here is denoted by the ratio of normal hand movements to the high frequency noises power on I/Q component. To demonstrate the effect of the filter, we collect 150 CSI samples with a duration of 96 ms. Then, we compute the standard deviation of CSI phase over the 96 ms segment for each subcarrier. Figure 10 shows that the average phase deviation significantly reduced from 0.032 radians before filtering to 0.025 radians after filtering. The denoising process is necessary for the coarse estimation in Section 4.2, since the performance of coarse estimation would degrade severely without denoising. 4.2 Coarse Initial Position Estimation After removing CSI noises, we use the phase difference between subcarriers to coarsely estimate the initial position of hand. The coarse initial position estimation can narrow down the candidate region, which greatly reduces the complexity of the later refinement algorithm. As shown in Eq. (2) , CSI of one pair of transceiver is the superimposition of all paths. Suppose that there is only one dynamic path (i.e., hand movement) in our system. Thus, the CSI vector of all paths on k-th subcarrier at time t can be described as: −→Hk (t) = −→Hk st + α k hd(t)e j(2πdhd(t)/λk+φhd) (4) where Hk st, α k hd(t), dhd(t), and φhd are the constant static vector, the attenuation coefficient, path length and initial phase for hand reflection, respectively. We can use −→Hk hd(t) = α k hd(t)e j(2πdhd(t)/λk+φhd) to represent the dynamic vector. As shown in Figure 11, the dynamic vector rotates due to the phase shift caused by hand movements. Furthermore, the phase difference of two subcarriers due to hand movement at time t can be described as: ∆pk1,k2 (t) = arg( −→H k2 hd(t)) − arg( −→H k1 hd(t)) (5) = 2πdhd(t)/λk2 − 2πdhd(t)/λk1 where we use k1, k2 to represent two different subcarriers and arg( −→Hk hd(t)) represents the the phase of dynamic vector corresponding to hand movement on subcarrier k. Once we know ∆pk1,k2 (t), the path length can be calculated as: dhd(t) = ∆pk1,k2 (t)λk1 λk2 2π(λk1 − λk2 ) . (6) We use the tangent vector corresponding to dynamic vector −→Hk hd(t), denoted as −→Hk tg(t), to estimate ∆pk1,k2 . The phase change of the dynamic vector is equivalent to phase change in its tangent vector: ∆pk1,k2 (t) = [arg( −→H k2 tg (t)) − π/2] − [arg( −→H k1 tg (t)) − π/2] = arg( −→H k2 tg (t)) − arg( −→H k1 tg (t)). (7)