正在加载图片...
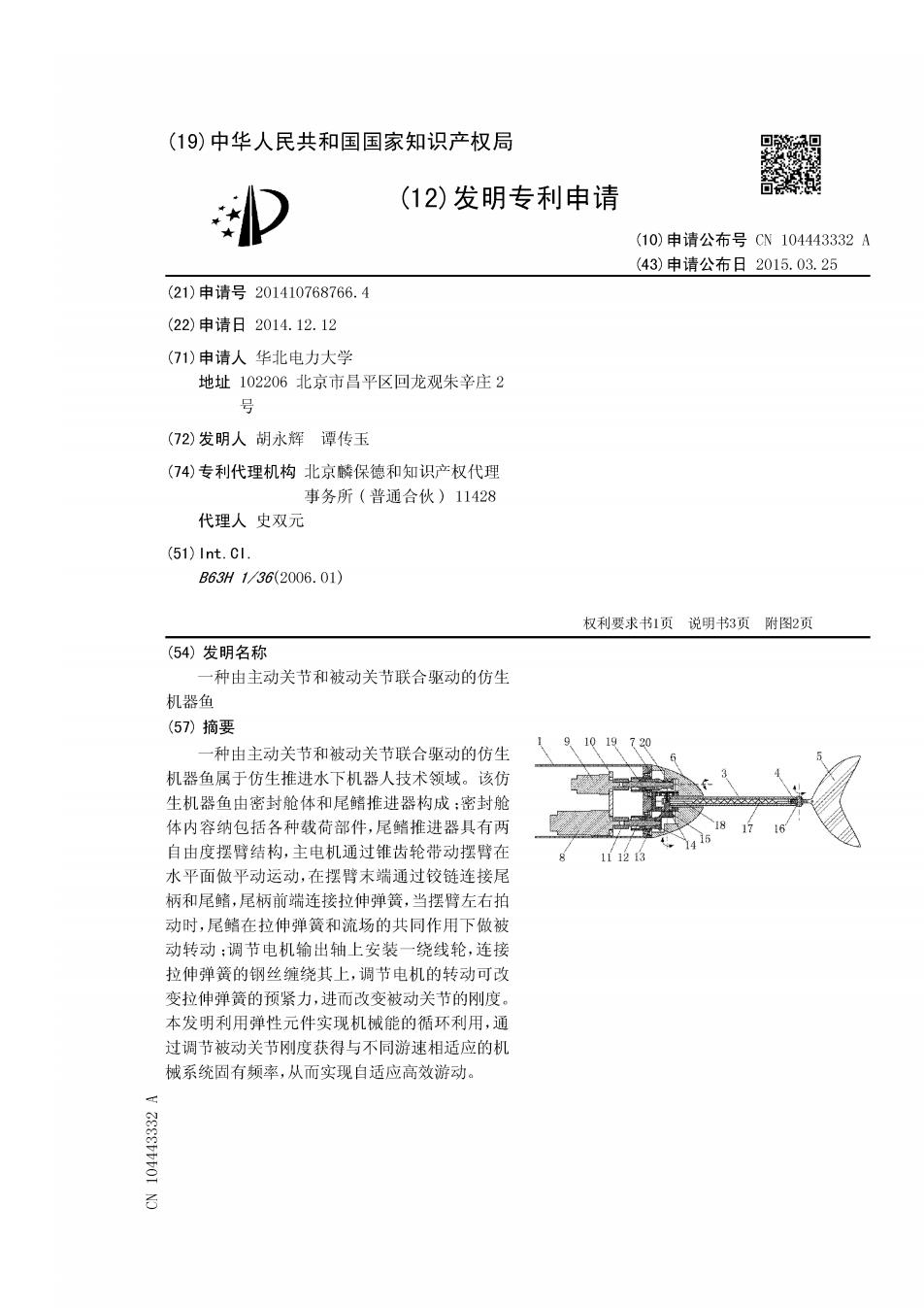
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104443332A (43)申请公布日2015.03.25 (21)申请号201410768766.4 (22)申请日2014.12.12 (71)申请人华北电力大学 地址102206北京市昌平区回龙观朱辛庄2 号 (72)发明人胡永辉谭传玉 (74)专利代理机构北京麟保德和知识产权代理 事务所(普通合伙)11428 代理人史双元 (51)1nt.cl. B63H1/36(2006.01) 权利要求书1页说明3页附图2页 (54)发明名称 一种由主动关节和被动关节联合驱动的仿生 机器鱼 (57))摘要 1019720 一种由主动关节和被动关节联合驱动的仿生 机器鱼属于仿生推进水下机器人技术领域。该仿 生机器鱼由密封舱体和尾鳍推进器构成:密封舱 体内容纳包括各种载荷部件,尾鳍推进器具有两 自由度摆臂结构,主电机通过锥齿轮带动摆臂在 水平面做平动运动,在摆臂末端通过铰链连接尾 柄和尾鳍,尾柄前端连接拉伸弹簧,当摆臂左右拍 动时,尾鳍在拉伸弹簧和流场的共同作用下做被 动转动:调节电机输出轴上安装一绕线轮,连接 拉伸弹簧的钢丝缠绕其上,调节电机的转动可改 变拉伸弹簧的预紧力,进而改变被动关节的刚度。 本发明利用弹性元件实现机械能的循环利用,通 过调节被动关节刚度获得与不同游速相适应的机 械系统固有频率,从而实现自适应高效游动。 72995550 石