正在加载图片...
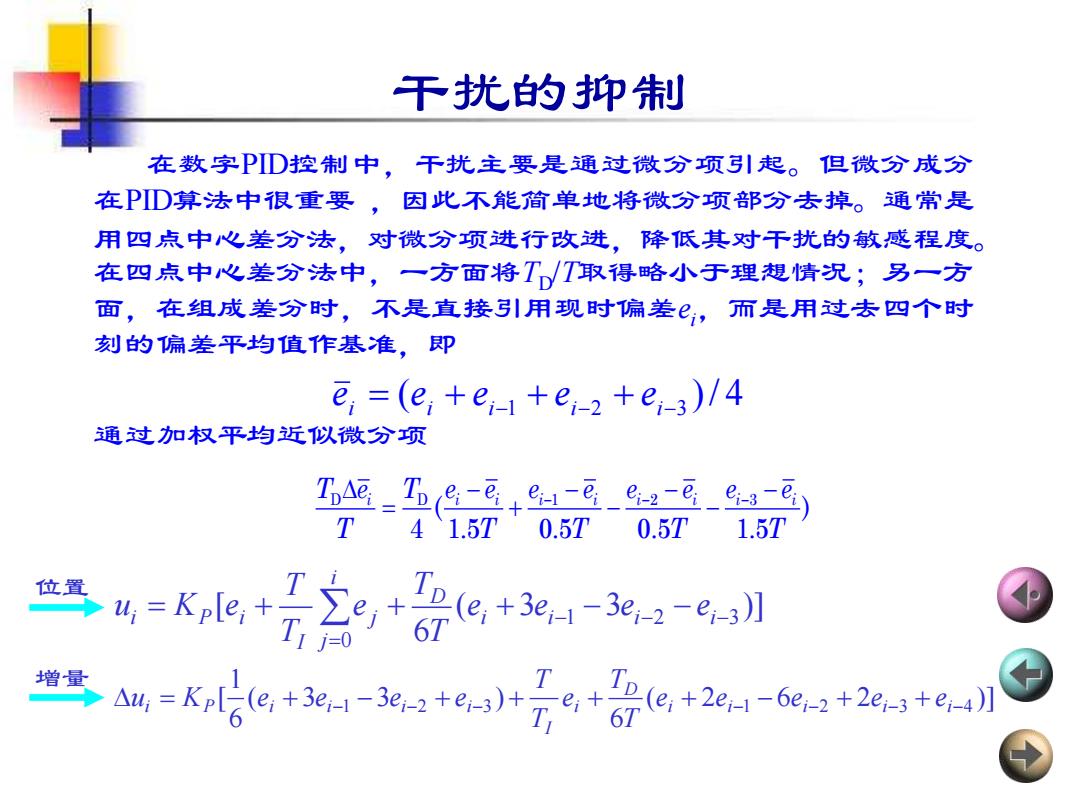
干扰的抑制 在数字PD控制中,干扰主要是通过微分项引起。但微分成分 在PD算法中很重要,因此不能简单地将微分项部分去掉。通常是 用四点中心差分法,对微分项进行改进,降低其对干扰的敏感程度。 在四点中心差分法中,一方面将T/T取得略小于理想情况;男一方 面,在组成差分时,不是直接引用现时偏差,而是用过去四个时 刻的偏差平均值作基准,即 e,=(e+e-+e,-2+e-3)/4 通过加权平均近似微分项 Toe To e-ee-e e-ees-e T 41.5T 0.5T 0.5T 1.5T 马=K,6+号+爱e+34--6】 i=0 三=Kg+4at6)7+君e+204+2】干扰的抑制 在数字PID控制中,干扰主要是通过微分项引起。但微分成分 在PID算法中很重要 ,因此不能简单地将微分项部分去掉。通常是 用四点中心差分法,对微分项进行改进,降低其对干扰的敏感程度。 在四点中心差分法中,一方面将TD /T取得略小于理想情况;另一方 面,在组成差分时,不是直接引用现时偏差ei,而是用过去四个时 刻的偏差平均值作基准,即 通过加权平均近似微分项 ei = (ei + ei−1 + ei−2 + ei−3 )/ 4 − − − − − − − = + − − D 1 2 3 D ( ) 4 1.5 0.5 0.5 1.5 T e e e e e e e e e i i i i i i i i i T T T T T T ( 3 3 )] 6 [ 0 1 2 3 = = + + + − − − − − i j i i i i D j I i P i e e e e T T e T T u K e ( 2 6 2 ) ] 6 ( 3 3 ) 6 1 [ = + −1 − −2 + −3 + + i + i−1 − i−2 + i−3 + i−4 D i I i P i i i i e e e e e T T e T T u K e e e e 位置 增量