正在加载图片...
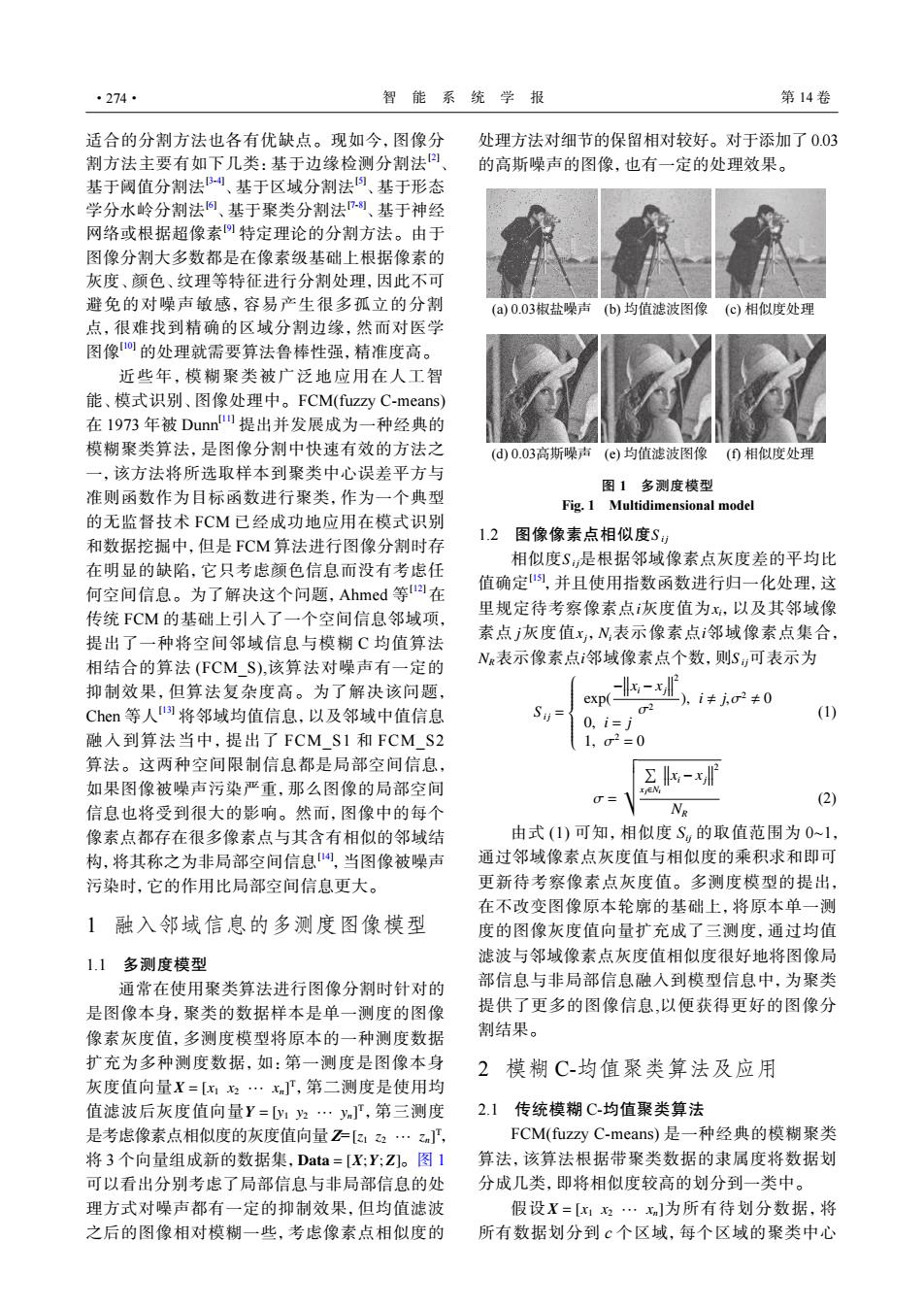
·274· 智能系统学报 第14卷 适合的分割方法也各有优缺点。现如今,图像分 处理方法对细节的保留相对较好。对于添加了0.03 割方法主要有如下几类:基于边缘检测分割法 的高斯噪声的图像,也有一定的处理效果。 基于阈值分割法、基于区域分割法、基于形态 学分水岭分割法、基于聚类分割法-、基于神经 网络或根据超像素特定理论的分割方法。由于 图像分割大多数都是在像素级基础上根据像素的 灰度、颜色、纹理等特征进行分割处理,因此不可 避免的对噪声敏感,容易产生很多孤立的分割 (a)0.03椒盐噪声(b)均值滤波图像(c)相似度处理 点,很难找到精确的区域分割边缘,然而对医学 图像0的处理就需要算法鲁棒性强,精准度高。 近些年,模糊聚类被广泛地应用在人工智 能、模式识别、图像处理中。FCM(fuzzy C-means) 在1973年被Dunn提出并发展成为一种经典的 模糊聚类算法,是图像分割中快速有效的方法之 (d0.03高斯噪声(©)均值滤波图像(①相似度处理 一,该方法将所选取样本到聚类中心误差平方与 图1多测度模型 准则函数作为目标函数进行聚类,作为一个典型 Fig.1 Multidimensional model 的无监督技术FCM已经成功地应用在模式识别 1.2 和数据挖掘中,但是FCM算法进行图像分割时存 图像像素点相似度S 相似度S是根据邻域像素点灰度差的平均比 在明显的缺陷,它只考虑颜色信息而没有考虑任 何空间信息。为了解决这个问题,Ahmed等在 值确定的,并且使用指数函数进行归一化处理,这 传统FCM的基础上引入了一个空间信息邻域项, 里规定待考察像素点灰度值为x,以及其邻域像 提出了一种将空间邻域信息与模糊C均值算法 素点j灰度值x,N,表示像素点邻域像素点集合, 相结合的算法(FCMS),该算法对噪声有一定的 表示像素点i邻域像素点个数,则S,可表示为 抑制效果,但算法复杂度高。为了解决该问题, -x exp(- i≠j,心2≠0 Chen等人将邻域均值信息,以及邻域中值信息 Su- (1) 0,i=j 融人到算法当中,提出了FCMS1和FCMS2 1.2=0 算法。这两种空间限制信息都是局部空间信息, 如果图像被噪声污染严重,那么图像的局部空间 Σ-x IjE 0= (2) 信息也将受到很大的影响。然而,图像中的每个 像素点都存在很多像素点与其含有相似的邻域结 由式(1)可知,相似度S,的取值范围为0~1, 构,将其称之为非局部空间信息,当图像被噪声 通过邻域像素点灰度值与相似度的乘积求和即可 污染时,它的作用比局部空间信息更大。 更新待考察像素点灰度值。多测度模型的提出, 在不改变图像原本轮廓的基础上,将原本单一测 1融入邻域信息的多测度图像模型 度的图像灰度值向量扩充成了三测度,通过均值 1.1多测度模型 滤波与邻域像素点灰度值相似度很好地将图像局 通常在使用聚类算法进行图像分割时针对的 部信息与非局部信息融入到模型信息中,为聚类 是图像本身,聚类的数据样本是单一测度的图像 提供了更多的图像信息,以便获得更好的图像分 像素灰度值,多测度模型将原本的一种测度数据 割结果。 扩充为多种测度数据,如:第一测度是图像本身 2模糊C-均值聚类算法及应用 灰度值向量X=[x·xJ「,第二测度是使用均 值滤波后灰度值向量Y=yy2·yJT,第三测度 2.1传统模糊C-均值聚类算法 是考虑像素点相似度的灰度值向量Z=[a12…zJ, FCM(fuzzy C-means)是一种经典的模糊聚类 将3个向量组成新的数据集,Data=[X:Y;Z)。图1 算法,该算法根据带聚类数据的隶属度将数据划 可以看出分别考虑了局部信息与非局部信息的处 分成几类,即将相似度较高的划分到一类中。 理方式对噪声都有一定的抑制效果,但均值滤波 假设X=[x1?…x]为所有待划分数据,将 之后的图像相对模糊一些,考虑像素点相似度的 所有数据划分到c个区域,每个区域的聚类中心适合的分割方法也各有优缺点。现如今,图像分 割方法主要有如下几类:基于边缘检测分割法[2] 、 基于阈值分割法[3-4] 、基于区域分割法[5] 、基于形态 学分水岭分割法[6] 、基于聚类分割法[7-8] 、基于神经 网络或根据超像素[9] 特定理论的分割方法。由于 图像分割大多数都是在像素级基础上根据像素的 灰度、颜色、纹理等特征进行分割处理,因此不可 避免的对噪声敏感,容易产生很多孤立的分割 点,很难找到精确的区域分割边缘,然而对医学 图像[10] 的处理就需要算法鲁棒性强,精准度高。 近些年,模糊聚类被广泛地应用在人工智 能、模式识别、图像处理中。FCM(fuzzy C-means) 在 1973 年被 Dunn[11] 提出并发展成为一种经典的 模糊聚类算法,是图像分割中快速有效的方法之 一,该方法将所选取样本到聚类中心误差平方与 准则函数作为目标函数进行聚类,作为一个典型 的无监督技术 FCM 已经成功地应用在模式识别 和数据挖掘中,但是 FCM 算法进行图像分割时存 在明显的缺陷,它只考虑颜色信息而没有考虑任 何空间信息。为了解决这个问题,Ahmed 等 [12] 在 传统 FCM 的基础上引入了一个空间信息邻域项, 提出了一种将空间邻域信息与模糊 C 均值算法 相结合的算法 (FCM_S),该算法对噪声有一定的 抑制效果,但算法复杂度高。为了解决该问题, Chen 等人[13] 将邻域均值信息,以及邻域中值信息 融入到算法当中,提出了 FCM_S1 和 FCM_S2 算法。这两种空间限制信息都是局部空间信息, 如果图像被噪声污染严重,那么图像的局部空间 信息也将受到很大的影响。然而,图像中的每个 像素点都存在很多像素点与其含有相似的邻域结 构,将其称之为非局部空间信息[14] ,当图像被噪声 污染时,它的作用比局部空间信息更大。 1 融入邻域信息的多测度图像模型 1.1 多测度模型 X = [x1 x2 ··· xn] T Y = [y1 y2 ··· yn] T [z1 z2 ··· zn] T Data = [X;Y; Z] 通常在使用聚类算法进行图像分割时针对的 是图像本身,聚类的数据样本是单一测度的图像 像素灰度值,多测度模型将原本的一种测度数据 扩充为多种测度数据,如:第一测度是图像本身 灰度值向量 ,第二测度是使用均 值滤波后灰度值向量 ,第三测度 是考虑像素点相似度的灰度值向量 Z= , 将 3 个向量组成新的数据集, 。图 1 可以看出分别考虑了局部信息与非局部信息的处 理方式对噪声都有一定的抑制效果,但均值滤波 之后的图像相对模糊一些,考虑像素点相似度的 处理方法对细节的保留相对较好。对于添加了 0.03 的高斯噪声的图像,也有一定的处理效果。 (e) 均值滤波图像 (a) 0.03椒盐噪声 (b) 均值滤波图像 (c) 相似度处理 (d) 0.03高斯噪声 (f) 相似度处理 图 1 多测度模型 Fig. 1 Multidimensional model 1.2 图像像素点相似度 S i j S i j i xi j xj Ni i NR i S i j 相似度 是根据邻域像素点灰度差的平均比 值确定[15] ,并且使用指数函数进行归一化处理,这 里规定待考察像素点 灰度值为 ,以及其邻域像 素点 灰度值 , 表示像素点 邻域像素点集合, 表示像素点 邻域像素点个数,则 可表示为 S i j = exp( − xi − xj 2 σ2 ), i , j,σ2 , 0 0, i = j 1, σ2 = 0 (1) σ = vuut ∑ xj∈Ni xi − xj 2 NR (2) 由式 (1) 可知,相似度 Sij 的取值范围为 0~1, 通过邻域像素点灰度值与相似度的乘积求和即可 更新待考察像素点灰度值。多测度模型的提出, 在不改变图像原本轮廓的基础上,将原本单一测 度的图像灰度值向量扩充成了三测度,通过均值 滤波与邻域像素点灰度值相似度很好地将图像局 部信息与非局部信息融入到模型信息中,为聚类 提供了更多的图像信息,以便获得更好的图像分 割结果。 2 模糊 C-均值聚类算法及应用 2.1 传统模糊 C-均值聚类算法 FCM(fuzzy C-means) 是一种经典的模糊聚类 算法,该算法根据带聚类数据的隶属度将数据划 分成几类,即将相似度较高的划分到一类中。 假设 X = [x1 x2 ··· xn] 为所有待划分数据,将 所有数据划分到 c 个区域,每个区域的聚类中心 ·274· 智 能 系 统 学 报 第 14 卷