正在加载图片...
第2期 狄岚,等:一种融合邻域信息的模糊C均值图像分割算法 ·275· 用V=[M2…表示,U=4为隶属度矩阵,即 x属于第i类的隶属度用,表示。其中W,的特性 J=∑∑-+∑∑,-(⑦ 如下 式中:元在FCMS1、FCMS2算法中代表像素点 4e[0,1],j=1,2…,n,i=1,2,…,c 邻域像素灰度值均值以及中值,通过这种方法将 2=102n 空间信息融入到了FCM算法中,但这种改进取得 的分割效果并不是很理想。 FCM算法通过最小化目标函数来得到最优 隶属度矩阵及聚类中心,一般表现形式为 w,∽=∑∑gx,- (3) e1户1 di,,-vill (4) 式中:d表示数据x到聚类中心v,的距离,本文此 (a)0.03椒盐噪声(b)FCM处理结果 处使用欧氏距离;m为模糊指数,用于调整隶属 度在每一类中的权重,一般取m=2,本文中同样 取m=2。式(3)为FCM目标函数的一般化形式, 该表达式反映了数据划分的紧密程度,目标函数 的值越小越能获得更好的聚类效果。根据隶属度 (c)0.03高斯噪声(d)FCM处理结果 的约束条件,使用拉格朗日乘子法优化目标函 数,对目标函数关于隶属度4,和聚类中心的偏导 图2FCM算法处理结果 Fig.2 results of FCM algorithm 数,令偏导数等于零,通过迭代获得隶属度与聚 类中心更新公式: 2.3FCM算法改进 如果在每次聚类迭代之前提供一些先验知识 (5) 作为辅助,聚类过程中再次融入空间信息,那么 将能够获得更好的图像分割结果。先验概率以及 邻域隶属度差异惩罚项就很好地将像素点的空间 Vi= (6) 4 信息引入算法中,且能够有效的抑制噪声,并且 1 能够较好地保留图像细节。 在迭代过程中,设置迭代条件-+<8,迭 2.3.1引入先验概率的隶属度矩阵 代停止,从而获得最优隶属度矩阵及聚类中心, 在图像分割中邻域像素点对待分割像素点的 完成数据聚类过程。 影响至关重要,在每一次聚类迭代之前,若有先 2.2FCMS1与FCMS2算法 验知识作为协助,那么将会得到更好的聚类结 图2是FCM算法对添加了0.03椒盐噪声以 果,也能够尽可能地减少像素点的误分割。引入 及0.03高斯噪声图像的处理结果,FCM算法对噪 先验概率的隶属度矩阵定义如下: 声处理效果很不理想。传统FCM算法进行图像 Nk 分割,是对图像像素点灰度值进行聚类,当图像 p二NR (8) 含有噪声时,算法将噪声点灰度值当成正常灰度 =py (9) 值进行聚类,因此FCM对噪声非常敏感,这是由 ∑P 于算法并没有考虑像素点空间信息的原因。在图 式中:N表示邻域像素点个数;W表示邻域像素 像分割中除了考虑像素点本身的数值信息外,像 点中属于第类的像素点个数。首次迭代随机产 素点灰度值的所属聚类类别很大程度上取决于邻 生隶属度矩阵,根据此矩阵计算出最初先验概率 域像素点灰度值的所属类别。因此,像素点的空 矩阵P。先验概率的引入,使得在每次聚类算法 间信息对图像分割有着很重要的影响。 迭代之前都会先更新隶属度矩阵,每个像素点的 为了解决FCM算法没有考虑空间信息的问 隶属度都会根据邻域像素点做出相应的调整。在 题,FCMS1、FCMS2算法对FCM算法有所改 不断地迭代过程中,修正了原本偏移正确分割类 进,提出了其目标函数为 别的像素点。V = [v1 v2 ··· vc] U = [ui j] xj ui j ui j 用 表示, 为隶属度矩阵,即 属于第 i 类的隶属度用 表示。其中 的特性 如下: ui j ∈ [0,1],∀ j = 1,2,··· ,n, ∀i = 1,2,··· , c ∑c i=1 ui j = 1, 0 < ∑n j=1 ui j < n FCM 算法通过最小化目标函数来得到最优 隶属度矩阵及聚类中心,一般表现形式为 J(U,V) = ∑c i=1 ∑n j=1 u m i j xj −vi 2 (3) di j = xj −vi (4) di j xj vi ui j vi 式中: 表示数据 到聚类中心 的距离,本文此 处使用欧氏距离;m 为模糊指数,用于调整隶属 度在每一类中的权重,一般取 m=2,本文中同样 取 m=2。式 (3) 为 FCM 目标函数的一般化形式, 该表达式反映了数据划分的紧密程度,目标函数 的值越小越能获得更好的聚类效果。根据隶属度 的约束条件,使用拉格朗日乘子法优化目标函 数,对目标函数关于隶属度 和聚类中心 的偏导 数,令偏导数等于零,通过迭代获得隶属度与聚 类中心更新公式: ui j = ∑c k=1 ( di j dk j) 2 m−1 −1 (5) vi = ∑n j=1 ui j m xj ∑n j=1 ui j m (6)
v k −v k+1
在迭代过程中,设置迭代条件
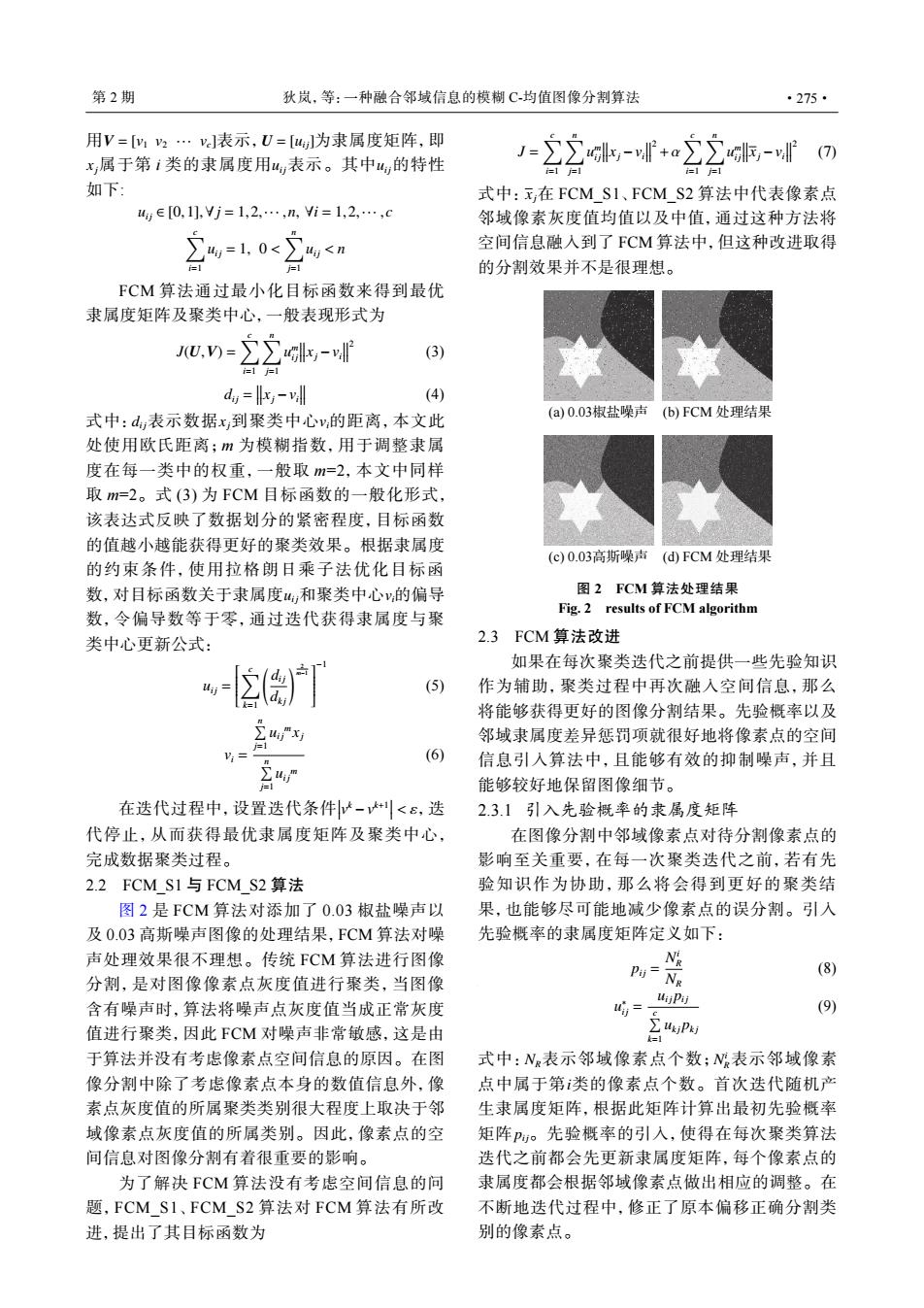
< ε ,迭 代停止,从而获得最优隶属度矩阵及聚类中心, 完成数据聚类过程。 2.2 FCM_S1 与 FCM_S2 算法 图 2 是 FCM 算法对添加了 0.03 椒盐噪声以 及 0.03 高斯噪声图像的处理结果,FCM 算法对噪 声处理效果很不理想。传统 FCM 算法进行图像 分割,是对图像像素点灰度值进行聚类,当图像 含有噪声时,算法将噪声点灰度值当成正常灰度 值进行聚类,因此 FCM 对噪声非常敏感,这是由 于算法并没有考虑像素点空间信息的原因。在图 像分割中除了考虑像素点本身的数值信息外,像 素点灰度值的所属聚类类别很大程度上取决于邻 域像素点灰度值的所属类别。因此,像素点的空 间信息对图像分割有着很重要的影响。 为了解决 FCM 算法没有考虑空间信息的问 题,FCM_S1、FCM_S2 算法对 FCM 算法有所改 进,提出了其目标函数为 J = ∑c i=1 ∑n j=1 u m i j xj −vi 2 +α ∑c i=1 ∑n j=1 u m i j xj −vi 2 (7) 式中: xj 在 FCM_S1、FCM_S2 算法中代表像素点 邻域像素灰度值均值以及中值,通过这种方法将 空间信息融入到了 FCM 算法中,但这种改进取得 的分割效果并不是很理想。 (a) 0.03椒盐噪声 (b) FCM 处理结果 (c) 0.03高斯噪声 (d) FCM 处理结果 图 2 FCM 算法处理结果 Fig. 2 results of FCM algorithm 2.3 FCM 算法改进 如果在每次聚类迭代之前提供一些先验知识 作为辅助,聚类过程中再次融入空间信息,那么 将能够获得更好的图像分割结果。先验概率以及 邻域隶属度差异惩罚项就很好地将像素点的空间 信息引入算法中,且能够有效的抑制噪声,并且 能够较好地保留图像细节。 2.3.1 引入先验概率的隶属度矩阵 在图像分割中邻域像素点对待分割像素点的 影响至关重要,在每一次聚类迭代之前,若有先 验知识作为协助,那么将会得到更好的聚类结 果,也能够尽可能地减少像素点的误分割。引入 先验概率的隶属度矩阵定义如下: pi j = N i R NR (8) u ∗ i j = ui j pi j ∑c k=1 uk j pk j (9) NR N i R i pi j 式中: 表示邻域像素点个数; 表示邻域像素 点中属于第 类的像素点个数。首次迭代随机产 生隶属度矩阵,根据此矩阵计算出最初先验概率 矩阵 。先验概率的引入,使得在每次聚类算法 迭代之前都会先更新隶属度矩阵,每个像素点的 隶属度都会根据邻域像素点做出相应的调整。在 不断地迭代过程中,修正了原本偏移正确分割类 别的像素点。 第 2 期 狄岚,等:一种融合邻域信息的模糊 C-均值图像分割算法 ·275·