正在加载图片...
·276· 智能系统学报 第14卷 2.3.2邻域隶属度差异惩罚项及算法模型 [x…x]T作为第一测度向量,采用均值滤波 虽然先验概率的引入已经将空间信息引入到 得到第二测度向量Y=y12…y严,通过考虑邻域 算法中,并且对噪声抑制效果明显,但是为了增 相似度处理得到第三测度向量Z=[31…J; 强算法的鲁棒性,这里引入邻域隶属度差异惩罚 2)取Data=[X:Y:Z]阻成多测度模型; 项6: 3)根据人工视觉预先确定聚类个数,设定聚 (10) 类中心个数c,隶属度模糊参数m=2,迭代停止条 1扫1k= 件ε=0.01,取1=400(从文献[17中获取): 式中:表示像素点j对第类的隶属度,1-表 4)初始化隶属度矩阵: 示邻域像素点k不属于第类的程度,这里邻域采 5)根据初始化得到的隶属度矩阵计算多测度 用3×3大小,邻域矩阵Q:的引入使得计算更加 模型先验概率矩阵p 方便。 6)更新隶属度矩阵; 了1,与k相邻,且j≠k 0:={0,肖k不相邻 (11) 7)更新聚类中心; 8)若w-+<E,即两次迭代差值小于e,算 因此邻域隶属度差异惩罚项指的是像素点与 法终止; 邻域像素点对每一个聚类中心的隶属度差异。邻 9)根据最终聚类中心V,以及隶属度U第一维 域隶属度差异度越小,则相邻的像素点越容易归 信息,完成最终的图像分割。 为一类。 改进后的目标函数可改写为 3实验结果与分析 J=∑∑G+222a-mre (12) 为了验证本文算法的有效性,对合成图像和 通过迭代获得隶属度并结合隶属度先验概率 自然图像在添加椒盐噪声及高斯噪声情况下进行 得到新的隶属度矩阵与聚类中心更新公式: 分割,对比算法为FCM、FCMS1、FCMS2、KW- FLICM,编译环境为MATLABR20I2a,CPU为 d2+∑(1-)Q i32310M,内存6GB。根据人工视觉预先确定聚 (13) d,2+A∑(1-t)mQ 类个数,设定聚类中心个数c,隶属度模糊参数 m=2,迭代停止条件s=0.01,取1=400(该取值从文 ∑x 献[1刀中获取)。 (14) 31合成图像去噪声算法对比 3.1.1合成图像添加椒盐噪声 2.3.3算法流程 对图像1和图像2添加0.05、0.08椒盐噪声, 1)算法思想 分别如图3、图4所示。 在进行图像分割时,或多或少都会受到噪声 的影响,传统模糊C均值算法对噪声敏感,究其 原因是因为其没有考虑像素点的空间信息。本文 算法首先使用多测度模型将图像信息从一测度扩 充成三测度,将局部信息与非局部信息引入多测 度模型中,为之后的聚类提供了更多的信息。其 (a)0.05椒盐噪声 (b)FCM SI (c)FCM S2 次,在原有隶属度矩阵的基础上乘以先验概率, 并且为算法本身添加邻域隶属度差异惩罚项,使 用改进算法对图像像素点灰度值信息进行聚类, 完成图像分割。 2)算法步骤 输入图像: (d)KWFLICM(e)本文算法 输出隶属度矩阵U,聚类中心V。 图3图像1加椒盐噪声效果对比 1)获取待分割图像I的灰度值向量X= Fig.3 Image 1 with pepper salt noise2.3.2 邻域隶属度差异惩罚项及算法模型 虽然先验概率的引入已经将空间信息引入到 算法中,并且对噪声抑制效果明显,但是为了增 强算法的鲁棒性,这里引入邻域隶属度差异惩罚 项 [16] : G = ∑n j=1 ∑c i=1 ∑n k=1 u ∗m i j(1−u ∗ ik) mQjk (10) u ∗ i j j i 1−u ∗ ik k i Qjk 式中: 表示像素点 对第 类的隶属度, 表 示邻域像素点 不属于第 类的程度,这里邻域采 用 3×3 大小,邻域矩阵 的引入使得计算更加 方便。 Qjk = { 1, 0, j与k相邻, 且j , k j与k不相邻 (11) 因此邻域隶属度差异惩罚项指的是像素点与 邻域像素点对每一个聚类中心的隶属度差异。邻 域隶属度差异度越小,则相邻的像素点越容易归 为一类。 改进后的目标函数可改写为 J = ∑c i=1 ∑n j=1 u ∗m i j d 2 i j +λ ∑n j=1 ∑c i=1 ∑n k=1 u ∗m i j (1−u ∗ ik) mQjk (12) 通过迭代获得隶属度并结合隶属度先验概率 得到新的隶属度矩阵与聚类中心更新公式: u ∗ i j = ∑c r=1 di j 2 +λ ∑n k=1 (1−uik) mQjk dr j 2 +λ ∑n k=1 (1−urk) mQjk 1 m−1 −1 pi j (13) vi = ∑n j=1 u ∗m i j xj ∑n j=1 u ∗m i j (14) 2.3.3 算法流程 1) 算法思想 在进行图像分割时,或多或少都会受到噪声 的影响,传统模糊 C-均值算法对噪声敏感,究其 原因是因为其没有考虑像素点的空间信息。本文 算法首先使用多测度模型将图像信息从一测度扩 充成三测度,将局部信息与非局部信息引入多测 度模型中,为之后的聚类提供了更多的信息。其 次,在原有隶属度矩阵的基础上乘以先验概率, 并且为算法本身添加邻域隶属度差异惩罚项,使 用改进算法对图像像素点灰度值信息进行聚类, 完成图像分割。 2) 算法步骤 输入 图像 I ; 输出 隶属度矩阵 U ,聚类中心 V。 1 ) 获取待分割图像 I 的灰度值向 量 X = [x1 x2 ··· xn] T Y = [y1 y2 ··· yn] T Z = [z1 z2 ··· zn] T 作为第一测度向量,采用均值滤波 得到第二测度向量 ,通过考虑邻域 相似度处理得到第三测度向量 ; 2) 取 Data = [X;Y; Z] 组成多测度模型; ε = 0.01 λ = 400 3) 根据人工视觉预先确定聚类个数,设定聚 类中心个数 c,隶属度模糊参数 m=2,迭代停止条 件 ,取 (从文献 [17] 中获取); 4) 初始化隶属度矩阵; pi j 5) 根据初始化得到的隶属度矩阵计算多测度 模型先验概率矩阵 ; 6) 更新隶属度矩阵; 7) 更新聚类中心;
v k −v k+1
8) 若
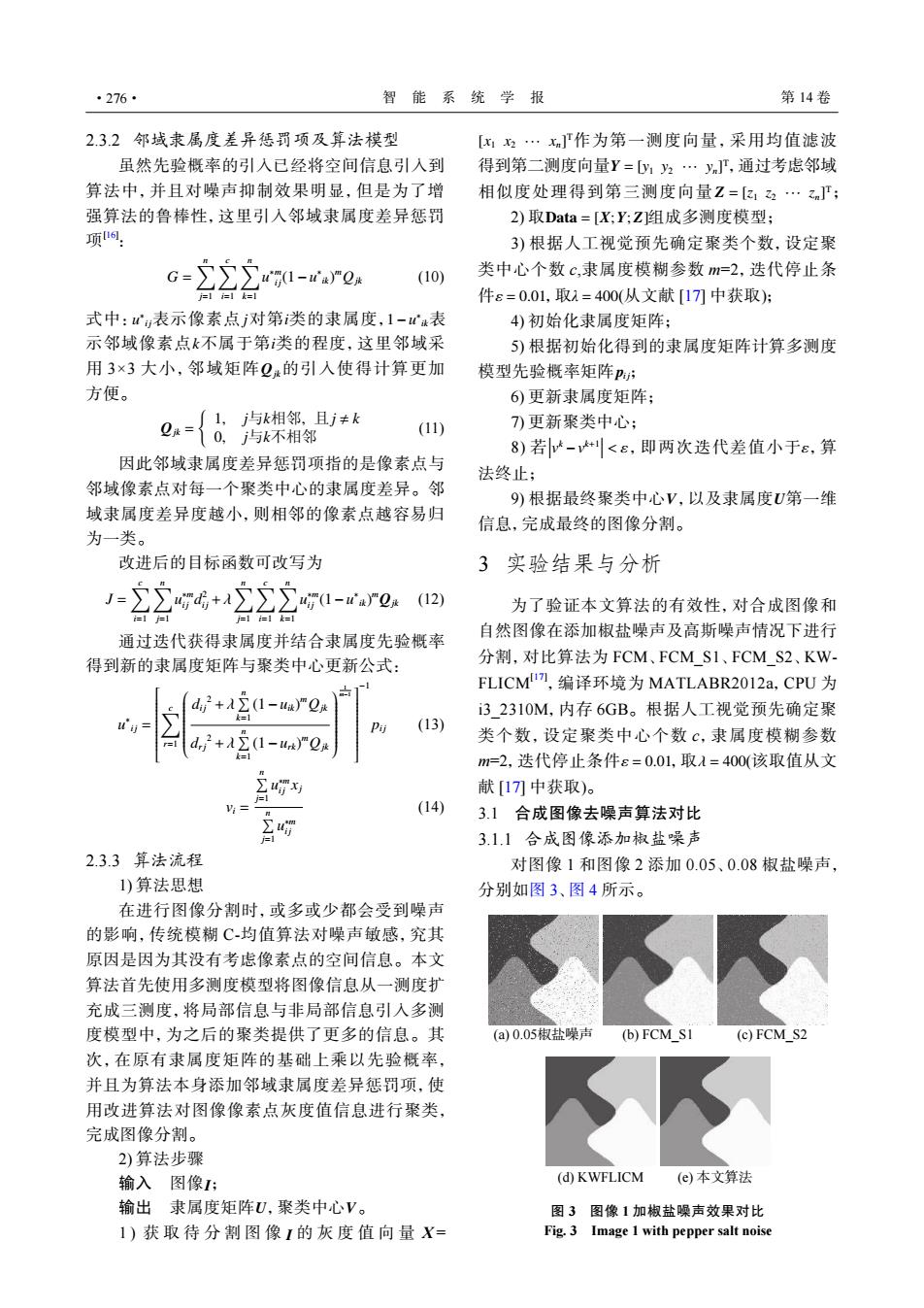
< ε ,即两次迭代差值小于ε,算 法终止; 9) 根据最终聚类中心 V ,以及隶属度 U 第一维 信息,完成最终的图像分割。 3 实验结果与分析 ε = 0.01 λ = 400 为了验证本文算法的有效性,对合成图像和 自然图像在添加椒盐噪声及高斯噪声情况下进行 分割,对比算法为 FCM、FCM_S1、FCM_S2、KWFLICM[17] ,编译环境为 MATLABR2012a,CPU 为 i3_2310M,内存 6GB。根据人工视觉预先确定聚 类个数,设定聚类中心个数 c,隶属度模糊参数 m=2,迭代停止条件 ,取 (该取值从文 献 [17] 中获取)。 3.1 合成图像去噪声算法对比 3.1.1 合成图像添加椒盐噪声 对图像 1 和图像 2 添加 0.05、0.08 椒盐噪声, 分别如图 3、图 4 所示。 (a) 0.05椒盐噪声 (b) FCM_S1 (c) FCM_S2 (d) KWFLICM (e) 本文算法 图 3 图像 1 加椒盐噪声效果对比 Fig. 3 Image 1 with pepper salt noise ·276· 智 能 系 统 学 报 第 14 卷