点击下载:上海交通大学:《力学仿生——启示与探索》课程教学资源(专利资料)陆地仿生(2015)一种用于蛇形仿生机器人转弯运动的组合控制方法
正在加载图片...
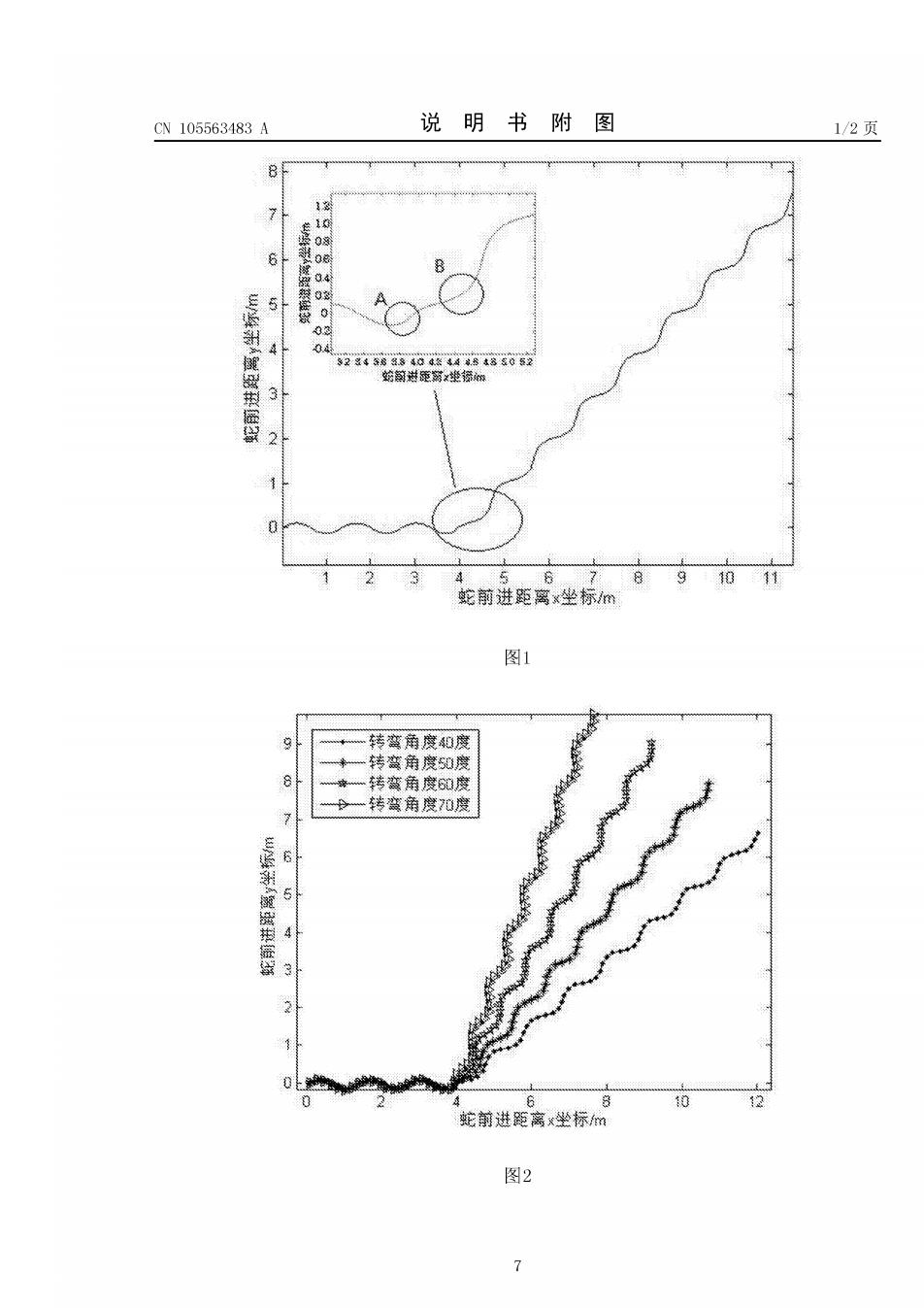
CN105563483A 说明书附图 1/2页 0 0 蛇筒进座篇垫播m 3 2 蛇前进距离×坐标m 图1 转震角度度 转蕊角度道 8 楼签角度如度 转高角度7心度 谷 4 3 蛇翦进距离鬯标m 图2 7
<<向上翻页
向下翻页>>
点击下载:上海交通大学:《力学仿生——启示与探索》课程教学资源(专利资料)陆地仿生(2015)一种用于蛇形仿生机器人转弯运动的组合控制方法
©2008-现在 cucdc.com 高等教育资讯网 版权所有