正在加载图片...
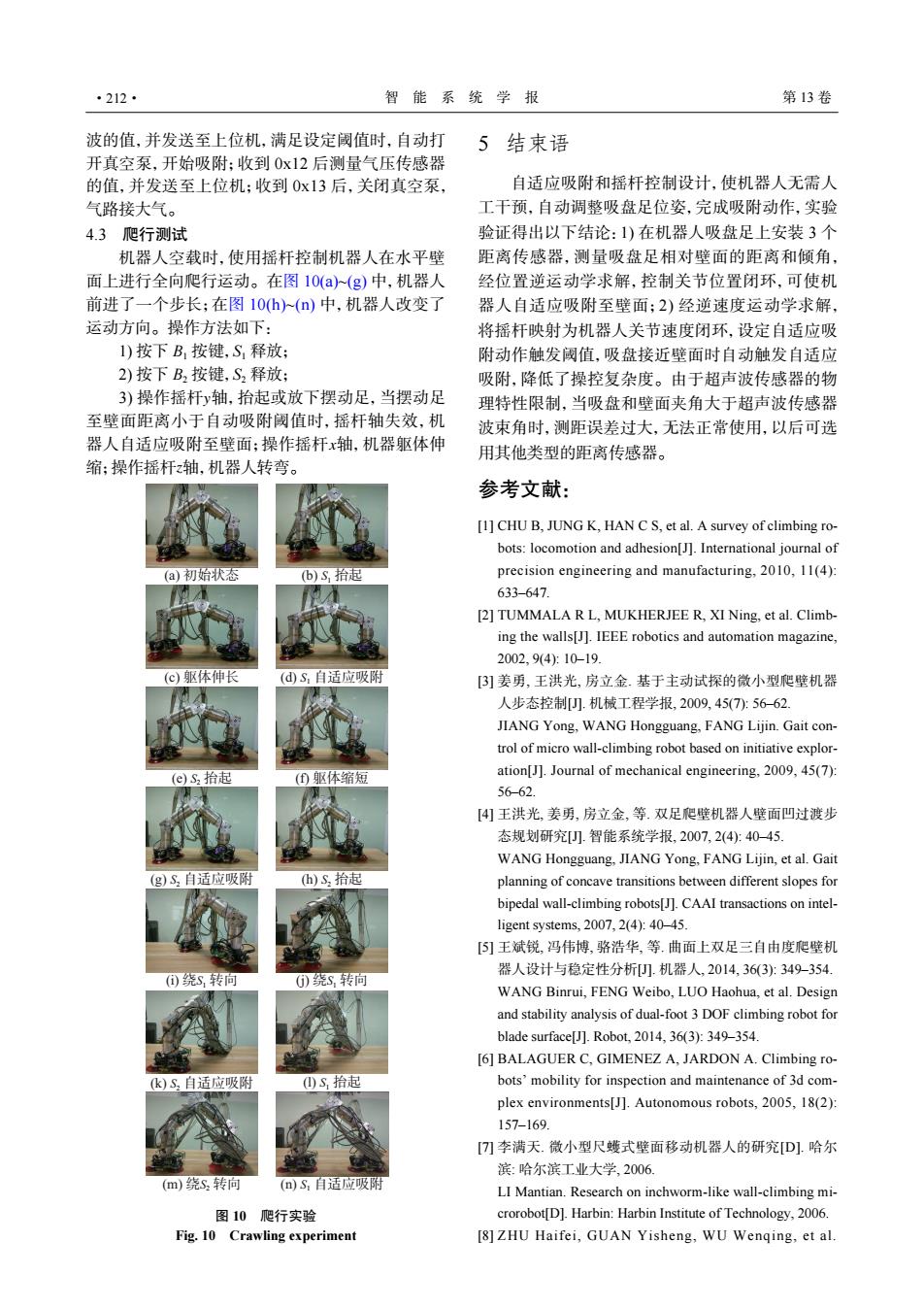
·212· 智能系统学报 第13卷 波的值,并发送至上位机,满足设定阈值时,自动打 5结束语 开真空泵,开始吸附:收到0x12后测量气压传感器 的值,并发送至上位机;收到0x13后,关闭真空泵, 自适应吸附和摇杆控制设计,使机器人无需人 气路接大气。 工干预,自动调整吸盘足位姿,完成吸附动作,实验 4.3爬行测试 验证得出以下结论:1)在机器人吸盘足上安装3个 机器人空载时,使用摇杆控制机器人在水平壁 距离传感器,测量吸盘足相对壁面的距离和倾角, 面上进行全向爬行运动。在图10(a(g)中,机器人 经位置逆运动学求解,控制关节位置闭环,可使机 前进了一个步长;在图10(h)(n)中,机器人改变了 器人自适应吸附至壁面;2)经逆速度运动学求解, 运动方向。操作方法如下: 将摇杆映射为机器人关节速度闭环,设定自适应吸 1)按下B按键,S1释放: 附动作触发阈值,吸盘接近壁面时自动触发自适应 2)按下B2按键,S2释放: 吸附,降低了操控复杂度。由于超声波传感器的物 3)操作摇杆y轴,抬起或放下摆动足,当摆动足 理特性限制,当吸盘和壁面夹角大于超声波传感器 至壁面距离小于自动吸附阈值时,摇杆轴失效,机 波束角时,测距误差过大,无法正常使用,以后可选 器人自适应吸附至壁面:操作摇杆x轴,机器躯体伸 用其他类型的距离传感器。 缩:操作摇杆z轴,机器人转弯。 参考文献: [1]CHU B,JUNG K,HAN C S,et al.A survey of climbing ro- bots:locomotion and adhesion[J].International journal of (a)初始状态 (b)S,拾起 precision engineering and manufacturing,2010,11(4): 633-647 [2]TUMMALA R L,MUKHERJEE R,XI Ning,et al.Climb- ing the walls[J].IEEE robotics and automation magazine, 2002,9(4:10-19 (©)躯体伸长 (dS,自适应吸附 [3)姜勇,王洪光,房立金.基于主动试探的微小型爬壁机器 人步态控制[).机械工程学报,2009,45(7):56-62, JIANG Yong,WANG Hongguang,FANG Lijin.Gait con- trol of micro wall-climbing robot based on initiative explor- (e)S2抬起 (①躯体缩短 ation[J].Journal of mechanical engineering,2009,45(7): 56-62. [4王洪光,姜勇,房立金,等.双足爬壁机器人壁面凹过渡步 态规划研究[).智能系统学报,2007,2(4):4045 WANG Hongguang,JIANG Yong.FANG Lijin,et al.Gait (g)S,自适应吸附 h)S,拾起 planning of concave transitions between different slopes for bipedal wall-climbing robots[J].CAAI transactions on intel- 1 igent systems,,2007,2(4):40-45. [)王斌锐,冯伟博,骆浩华,等.曲面上双足三自由度爬壁机 ①)绕S转向 )绕转向 器人设计与稳定性分析[U.机器人,2014,36(3):349-354. WANG Binrui,FENG Weibo,LUO Haohua,et al.Design and stability analysis of dual-foot 3 DOF climbing robot for blade surface[J].Robot,2014,36(3):349-354. [6]BALAGUER C,GIMENEZ A,JARDON A.Climbing ro- k)S,自适应吸附 )S抬起 bots'mobility for inspection and maintenance of 3d com- plex environments[J].Autonomous robots,2005,18(2): 157-169. [)李满天.微小型尺蠖式壁面移动机器人的研究D]哈尔 滨:哈尔滨工业大学,2006. (m)绕S转向 ()S自适应吸附 LI Mantian.Research on inchworm-like wall-climbing mi- 图10爬行实验 crorobot D].Harbin:Harbin Institute of Technology,2006. Fig.10 Crawling experiment [8]ZHU Haifei,GUAN Yisheng,WU Wenqing,et al.波的值,并发送至上位机,满足设定阈值时,自动打 开真空泵,开始吸附;收到 0x12 后测量气压传感器 的值,并发送至上位机;收到 0x13 后,关闭真空泵, 气路接大气。 4.3 爬行测试 机器人空载时,使用摇杆控制机器人在水平壁 面上进行全向爬行运动。在图 10(a)~(g) 中,机器人 前进了一个步长;在图 10(h)~(n) 中,机器人改变了 运动方向。操作方法如下: 1) 按下 B1 按键,S1 释放; 2) 按下 B2 按键,S2 释放; y x z 3) 操作摇杆 轴,抬起或放下摆动足,当摆动足 至壁面距离小于自动吸附阈值时,摇杆轴失效,机 器人自适应吸附至壁面;操作摇杆 轴,机器躯体伸 缩;操作摇杆 轴,机器人转弯。 (a) ݉⟢ᔭ (b) S1 ៘䊣 (c) 䏛ѿѤ䪫 (d) S1 㜖䔮Ꮐ।䭰 (e) S2 ៘䊣 (f) 䏛ѿ㑕ⴙ (g) S2 㜖䔮Ꮐ।䭰 (h) S2 ៘䊣 (i) 㐁S1 䒘ऽ (j) 㐁S1 䒘ऽ (k) S2 㜖䔮Ꮐ।䭰 (l) S1 ៘䊣 (m) 㐁S2 䒘ऽ (n) S1 㜖䔮Ꮐ।䭰 图 10 爬行实验 Fig. 10 Crawling experiment 5 结束语 自适应吸附和摇杆控制设计,使机器人无需人 工干预,自动调整吸盘足位姿,完成吸附动作,实验 验证得出以下结论:1) 在机器人吸盘足上安装 3 个 距离传感器,测量吸盘足相对壁面的距离和倾角, 经位置逆运动学求解,控制关节位置闭环,可使机 器人自适应吸附至壁面;2) 经逆速度运动学求解, 将摇杆映射为机器人关节速度闭环,设定自适应吸 附动作触发阈值,吸盘接近壁面时自动触发自适应 吸附,降低了操控复杂度。由于超声波传感器的物 理特性限制,当吸盘和壁面夹角大于超声波传感器 波束角时,测距误差过大,无法正常使用,以后可选 用其他类型的距离传感器。 参考文献: CHU B, JUNG K, HAN C S, et al. A survey of climbing robots: locomotion and adhesion[J]. International journal of precision engineering and manufacturing, 2010, 11(4): 633–647. [1] TUMMALA R L, MUKHERJEE R, XI Ning, et al. Climbing the walls[J]. IEEE robotics and automation magazine, 2002, 9(4): 10–19. [2] 姜勇, 王洪光, 房立金. 基于主动试探的微小型爬壁机器 人步态控制[J]. 机械工程学报, 2009, 45(7): 56–62. JIANG Yong, WANG Hongguang, FANG Lijin. Gait control of micro wall-climbing robot based on initiative exploration[J]. Journal of mechanical engineering, 2009, 45(7): 56–62. [3] 王洪光, 姜勇, 房立金, 等. 双足爬壁机器人壁面凹过渡步 态规划研究[J]. 智能系统学报, 2007, 2(4): 40–45. WANG Hongguang, JIANG Yong, FANG Lijin, et al. Gait planning of concave transitions between different slopes for bipedal wall-climbing robots[J]. CAAI transactions on intelligent systems, 2007, 2(4): 40–45. [4] 王斌锐, 冯伟博, 骆浩华, 等. 曲面上双足三自由度爬壁机 器人设计与稳定性分析[J]. 机器人, 2014, 36(3): 349–354. WANG Binrui, FENG Weibo, LUO Haohua, et al. Design and stability analysis of dual-foot 3 DOF climbing robot for blade surface[J]. Robot, 2014, 36(3): 349–354. [5] BALAGUER C, GIMENEZ A, JARDON A. Climbing robots’ mobility for inspection and maintenance of 3d complex environments[J]. Autonomous robots, 2005, 18(2): 157–169. [6] 李满天. 微小型尺蠖式壁面移动机器人的研究[D]. 哈尔 滨: 哈尔滨工业大学, 2006. LI Mantian. Research on inchworm-like wall-climbing microrobot[D]. Harbin: Harbin Institute of Technology, 2006. [7] [8] ZHU Haifei, GUAN Yisheng, WU Wenqing, et al. ·212· 智 能 系 统 学 报 第 13 卷