正在加载图片...
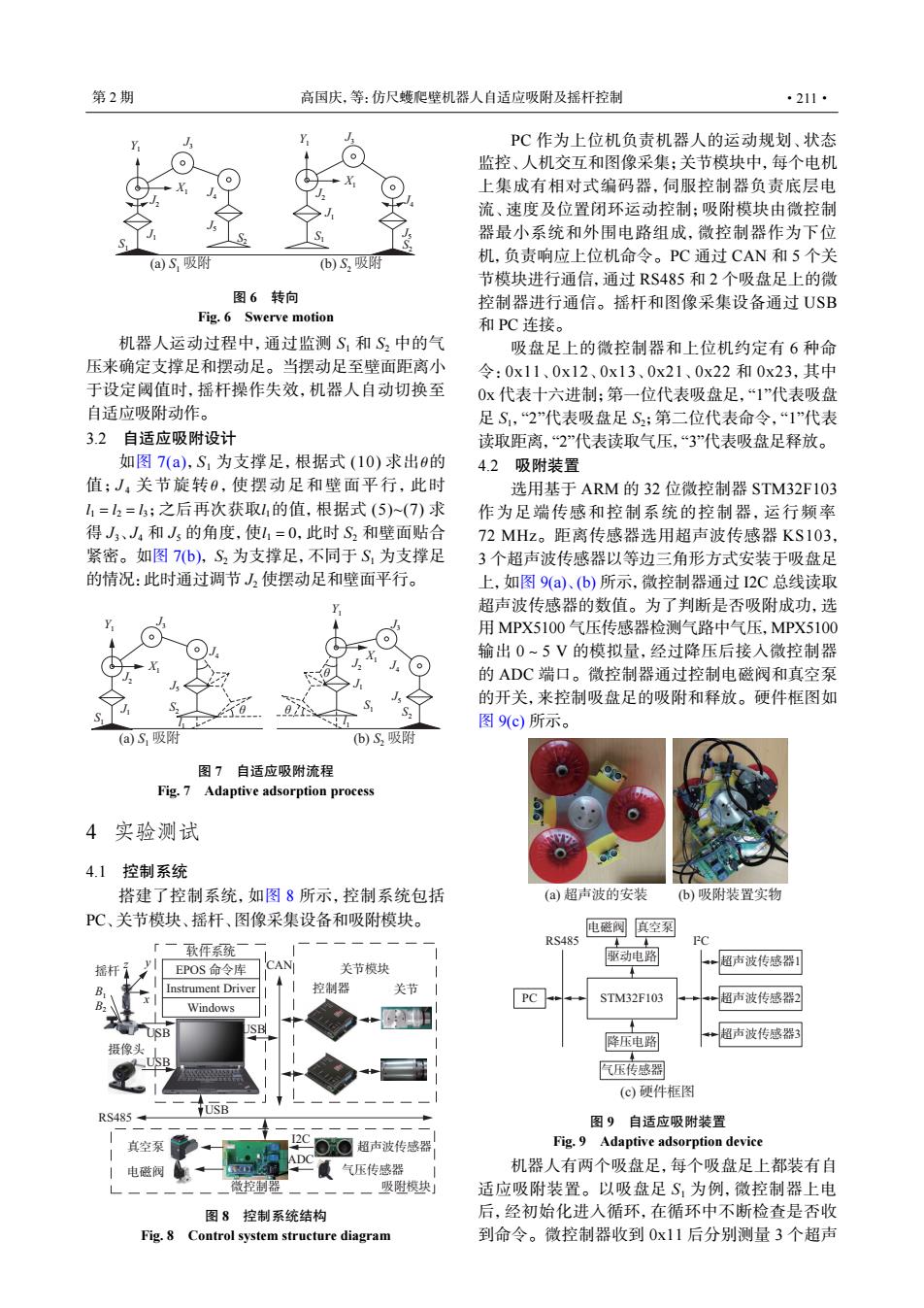
第2期 高国庆,等:仿尺蠖爬壁机器人自适应吸附及摇杆控制 ·211· PC作为上位机负责机器人的运动规划、状态 监控、人机交互和图像采集;关节模块中,每个电机 上集成有相对式编码器,伺服控制器负责底层电 流、速度及位置闭环运动控制:吸附模块由微控制 器最小系统和外围电路组成,微控制器作为下位 (a)S吸附 (b)S,吸附 机,负责响应上位机命令。PC通过CAN和5个关 节模块进行通信,通过RS485和2个吸盘足上的微 图6转向 控制器进行通信。摇杆和图像采集设备通过USB Fig.6 Swerve motion 和PC连接。 机器人运动过程中,通过监测S,和S,中的气 吸盘足上的微控制器和上位机约定有6种命 压来确定支撑足和摆动足。当摆动足至壁面距离小 令:0x11、0x12、0x13、0x21、0x22和0x23,其中 于设定阈值时,摇杆操作失效,机器人自动切换至 0x代表十六进制:第一位代表吸盘足,“1”代表吸盘 自适应吸附动作。 足S,“2”代表吸盘足S2;第二位代表命令,“1”代表 3.2自适应吸附设计 读取距离,“2”代表读取气压,“3”代表吸盘足释放。 如图7(a),S,为支撑足,根据式(10)求出e的 4.2吸附装置 值;J4关节旋转0,使摆动足和壁面平行,此时 选用基于ARM的32位微控制器STM32F103 ,=2=;之后再次获取1,的值,根据式(5)(7)求 作为足端传感和控制系统的控制器,运行频率 得J3、J4和J的角度,使1=0,此时S2和壁面贴合 72MHz。距离传感器选用超声波传感器KS103, 紧密。如图7b),S2为支撑足,不同于S,为支撑足 3个超声波传感器以等边三角形方式安装于吸盘足 的情况:此时通过调节)2使摆动足和壁面平行。 上,如图9(a)、(b)所示,微控制器通过I2C总线读取 超声波传感器的数值。为了判断是否吸附成功,选 用MPX5100气压传感器检测气路中气压,MPX5100 输出0~5V的模拟量,经过降压后接入微控制器 的ADC端口。微控制器通过控制电磁阀和真空泵 的开关,来控制吸盘足的吸附和释放。硬件框图如 图9(c)所示。 (a)S,吸附 (b)S,吸附 图7自适应吸附流程 Fig.7 Adaptive adsorption process 4实验测试 4.1控制系统 搭建了控制系统,如图8所示,控制系统包括 (a)超声波的安装 (6)吸附装置实物 PC、关节模块、摇杆、图像采集设备和吸附模块。 电磁阀空泵 RS485 软件系统 驱动电路 超声波传感器1 摇杆 EPOS命令库 CAN 关节模块 Instrument Driver 控制器 关节 STM32F103 Windows PC 超声波传感器2 USB 超声波传感器3 摄像头 降压电路 气压传感器 (©)硬件框图 USB RS4854 图9自适应吸附装置 其空泵 ○①超声波传感器 Fig.9 Adaptive adsorption device 电磁阀 气压传感器 机器人有两个吸盘足,每个吸盘足上都装有自 微控制器 吸附模块 适应吸附装置。以吸盘足S,为例,微控制器上电 图8控制系统结构 后,经初始化进入循环,在循环中不断检查是否收 Fig.8 Control system structure diagram 到命令。微控制器收到0x11后分别测量3个超声Y1 X1 J5 J4 J1 J2 J3 S2 S1 Y1 X1 J1 J2 J5 J4 J3 S1 S2 (a) S1 吸附 (b) S2 吸附 图 6 转向 Fig. 6 Swerve motion 机器人运动过程中,通过监测 S1 和 S2 中的气 压来确定支撑足和摆动足。当摆动足至壁面距离小 于设定阈值时,摇杆操作失效,机器人自动切换至 自适应吸附动作。 3.2 自适应吸附设计 θ θ l1 = l2 = l3 l1 l1 = 0 如图 7(a),S1 为支撑足,根据式 (10) 求出 的 值 ; J 4 关节旋转 ,使摆动足和壁面平行,此时 ;之后再次获取 的值,根据式 (5)~(7) 求 得 J3、J4 和 J5 的角度,使 ,此时 S2 和壁面贴合 紧密。如图 7(b), S2 为支撑足,不同于 S1 为支撑足 的情况:此时通过调节 J2 使摆动足和壁面平行。 Y1 J1 J3 S1 S2 l1 Y1 X1 J5 J4 J2 J3 θ θ X1 J2 J5 J4 θ J1 S1 l1 S2 (a) S1 吸附 (b) S2 吸附 图 7 自适应吸附流程 Fig. 7 Adaptive adsorption process 4 实验测试 4.1 控制系统 搭建了控制系统,如图 8 所示,控制系统包括 PC、关节模块、摇杆、图像采集设备和吸附模块。 Windows CAN RS485 㞮ڟ 䒛Т㈧㐋 ᥳᱲ I2C ьᙋஔࢷ∑ 䊱ผ∎ьᙋஔ ᣓݢஔ ⱋ⾦∡ ⩡ⷭ䬬 Instrument Driver EPOS АᎿ ᓚᣓݢஔ 㞮Ὅಃڟ ।䭰Ὅಃ ᥰ USB USB USB USB x z y B2 B1 ADC 图 8 控制系统结构 Fig. 8 Control system structure diagram PC 作为上位机负责机器人的运动规划、状态 监控、人机交互和图像采集;关节模块中,每个电机 上集成有相对式编码器,伺服控制器负责底层电 流、速度及位置闭环运动控制;吸附模块由微控制 器最小系统和外围电路组成,微控制器作为下位 机,负责响应上位机命令。PC 通过 CAN 和 5 个关 节模块进行通信,通过 RS485 和 2 个吸盘足上的微 控制器进行通信。摇杆和图像采集设备通过 USB 和 PC 连接。 吸盘足上的微控制器和上位机约定有 6 种命 令:0x11、0x12、0x13、0x21、0x22 和 0x23,其中 0x 代表十六进制;第一位代表吸盘足,“1”代表吸盘 足 S1,“2”代表吸盘足 S2;第二位代表命令,“1”代表 读取距离,“2”代表读取气压,“3”代表吸盘足释放。 4.2 吸附装置 选用基于 ARM 的 32 位微控制器 STM32F103 作为足端传感和控制系统的控制器,运行频率 72 MHz。距离传感器选用超声波传感器 KS103, 3 个超声波传感器以等边三角形方式安装于吸盘足 上,如图 9(a)、(b) 所示,微控制器通过 I2C 总线读取 超声波传感器的数值。为了判断是否吸附成功,选 用 MPX5100 气压传感器检测气路中气压,MPX5100 输出 0~5 V 的模拟量,经过降压后接入微控制器 的 ADC 端口。微控制器通过控制电磁阀和真空泵 的开关,来控制吸盘足的吸附和释放。硬件框图如 图 9(c) 所示。 (c) Тᵲప (a) 䊱ผ∎⮰Ⴕ㷱 (b) ।䭰㷱㒚➕ 䊱ผ∎ьᙋஔ1 䊱ผ∎ьᙋஔ2 䊱ผ∎ьᙋஔ3 RS485 PC 䭹ࢷ⩡䌛 ьᙋஔࢷ∑ 依ߔ⩡䌛 ⩡ⷭ䬬 ⱋ⾦∡ I 2C STM32F103 图 9 自适应吸附装置 Fig. 9 Adaptive adsorption device 机器人有两个吸盘足,每个吸盘足上都装有自 适应吸附装置。以吸盘足 S1 为例,微控制器上电 后,经初始化进入循环,在循环中不断检查是否收 到命令。微控制器收到 0x11 后分别测量 3 个超声 第 2 期 高国庆,等:仿尺蠖爬壁机器人自适应吸附及摇杆控制 ·211·