正在加载图片...
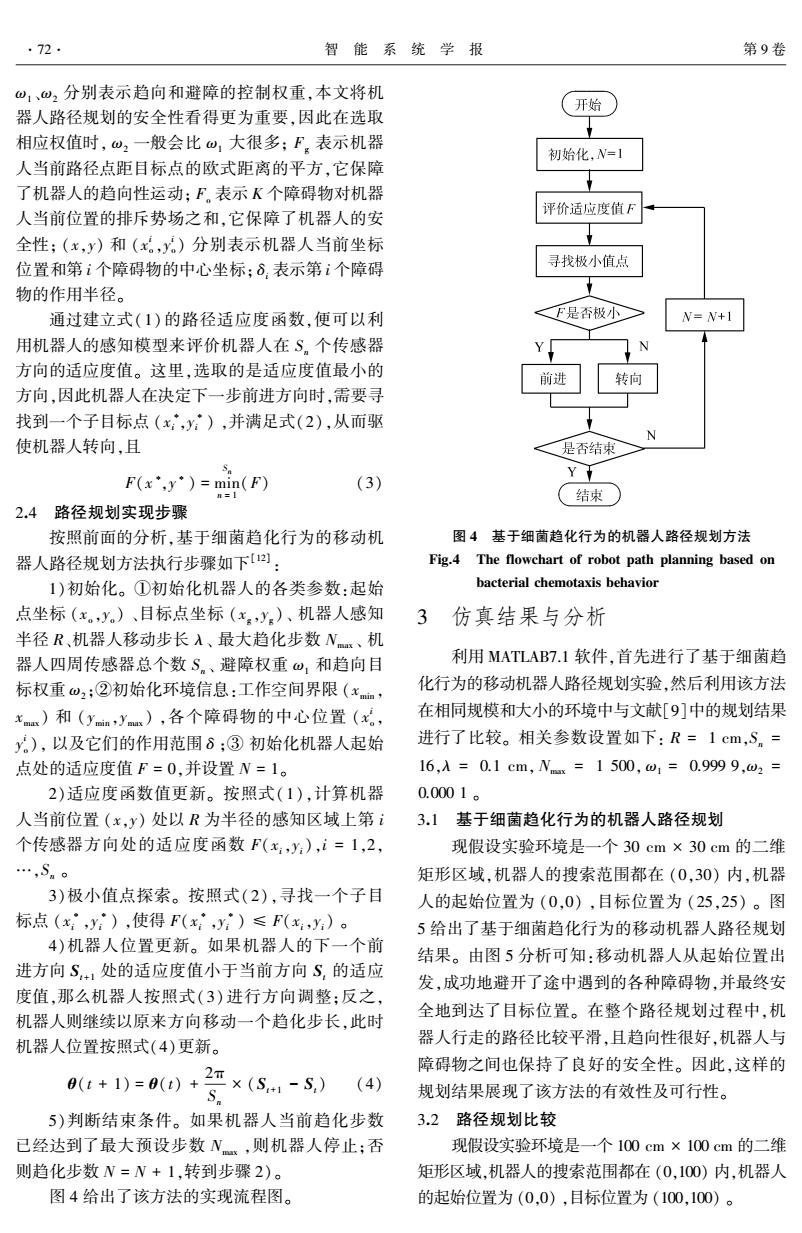
.72. 智能系统学报 第9卷 ω1、ω2分别表示趋向和避障的控制权重,本文将机 、开始 器人路径规划的安全性看得更为重要,因此在选取 相应权值时,w2一般会比ω,大很多:F,表示机器 初始化,N=1 人当前路径点距目标点的欧式距离的平方,它保障 了机器人的趋向性运动;F,表示K个障碍物对机器 人当前位置的排斥势场之和,它保障了机器人的安 评价适应度值F 全性;(x,y)和(x。,y)分别表示机器人当前坐标 位置和第i个障碍物的中心坐标:δ:表示第i个障碍 寻找极小值点 物的作用半径。 通过建立式(1)的路径适应度函数,便可以利 F是否极小> N=N+1 用机器人的感知模型来评价机器人在$。个传感器 Y N 方向的适应度值。这里,选取的是适应度值最小的 前进 转向 方向,因此机器人在决定下一步前进方向时,需要寻 找到一个子目标点(x,y),并满足式(2),从而驱 N 使机器人转向,且 是否结束 Sa F(x,y°)=min(F) (3) Y n三1 结束 2.4路径规划实现步骤 按照前面的分析,基于细菌趋化行为的移动机 图4基于细菌趋化行为的机器人路径规划方法 器人路径规划方法执行步骤如下四: Fig.4 The flowchart of robot path planning based on 1)初始化。①初始化机器人的各类参数:起始 bacterial chemotaxis behavior 点坐标(x。水)、目标点坐标(x)、机器人感知 3 仿真结果与分析 半径R、机器人移动步长入、最大趋化步数N、机 器人四周传感器总个数S。、避障权重w,和趋向目 利用MATLAB7.1软件,首先进行了基于细菌趋 标权重w,;②初始化环境信息:工作空间界限(x, 化行为的移动机器人路径规划实验,然后利用该方法 xx)和(yin,yx),各个障碍物的中心位置(x。, 在相同规模和大小的环境中与文献[9]中的规划结果 y。),以及它们的作用范围6;③初始化机器人起始 进行了比较。相关参数设置如下:R=1cm,S。= 点处的适应度值F=0,并设置N=1。 16,入=0.1cm,Nx=1500,w1=0.9999,w2= 2)适应度函数值更新。按照式(1),计算机器 0.0001。 人当前位置(x,y)处以R为半径的感知区域上第i 3.1基于细菌趋化行为的机器人路径规划 个传感器方向处的适应度函数F(x:,y:),i=1,2, 现假设实验环境是一个30cm×30cm的二维 …,Sno 矩形区域,机器人的搜索范围都在(0,30)内,机器 3)极小值点探索。按照式(2),寻找一个子目 人的起始位置为(0,0),目标位置为(25,25)。图 标点(xy),使得F(xy)≤F(x:y:)。 5给出了基于细菌趋化行为的移动机器人路径规划 4)机器人位置更新。如果机器人的下一个前 结果。由图5分析可知:移动机器人从起始位置出 进方向S,+1处的适应度值小于当前方向S,的适应 发,成功地避开了途中遇到的各种障碍物,并最终安 度值,那么机器人按照式(3)进行方向调整:反之, 机器人则继续以原来方向移动一个趋化步长,此时 全地到达了目标位置。在整个路径规划过程中,机 机器人位置按照式(4)更新。 器人行走的路径比较平滑,且趋向性很好,机器人与 障碍物之间也保持了良好的安全性。因此,这样的 0(L+1)=0()+2π×(S1-S,) (4) S 规划结果展现了该方法的有效性及可行性。 5)判断结束条件。如果机器人当前趋化步数 3.2路径规划比较 已经达到了最大预设步数N,则机器人停止:否 现假设实验环境是一个100cm×100cm的二维 则趋化步数N=N+1,转到步骤2)。 矩形区域,机器人的搜索范围都在(0,100)内,机器人 图4给出了该方法的实现流程图。 的起始位置为(0,0),目标位置为(100,100)。ω1 、ω2 分别表示趋向和避障的控制权重,本文将机 器人路径规划的安全性看得更为重要,因此在选取 相应权值时, ω2 一般会比 ω1 大很多; Fg 表示机器 人当前路径点距目标点的欧式距离的平方,它保障 了机器人的趋向性运动; Fo 表示 K 个障碍物对机器 人当前位置的排斥势场之和,它保障了机器人的安 全性; (x,y) 和 (x i o,y i o) 分别表示机器人当前坐标 位置和第 i 个障碍物的中心坐标; δi 表示第 i 个障碍 物的作用半径。 通过建立式(1) 的路径适应度函数,便可以利 用机器人的感知模型来评价机器人在 Sn 个传感器 方向的适应度值。 这里,选取的是适应度值最小的 方向,因此机器人在决定下一步前进方向时,需要寻 找到一个子目标点 (x ∗ i ,y ∗ i ) ,并满足式(2),从而驱 使机器人转向,且 F(x ∗ ,y ∗ ) = min Sn n = 1 (F) (3) 2.4 路径规划实现步骤 按照前面的分析,基于细菌趋化行为的移动机 器人路径规划方法执行步骤如下[12] : 1)初始化。 ①初始化机器人的各类参数:起始 点坐标 (xo,yo) 、目标点坐标 (xg,yg)、 机器人感知 半径 R、机器人移动步长 λ、 最大趋化步数 Nmax、 机 器人四周传感器总个数 Sn 、 避障权重 ω1 和趋向目 标权重 ω2 ;②初始化环境信息:工作空间界限 (xmin , xmax) 和 (ymin ,ymax) ,各个障碍物的中心位置 (x i o, y i o), 以及它们的作用范围 δ ;③ 初始化机器人起始 点处的适应度值 F = 0,并设置 N = 1。 2)适应度函数值更新。 按照式(1),计算机器 人当前位置 (x,y) 处以 R 为半径的感知区域上第 i 个传感器方向处的适应度函数 F(xi,yi),i = 1,2, …,Sn 。 3)极小值点探索。 按照式(2),寻找一个子目 标点 (x ∗ i ,y ∗ i ) ,使得 F(x ∗ i ,y ∗ i ) ≤ F(xi,yi) 。 4)机器人位置更新。 如果机器人的下一个前 进方向 St+1 处的适应度值小于当前方向 St 的适应 度值,那么机器人按照式(3) 进行方向调整;反之, 机器人则继续以原来方向移动一个趋化步长,此时 机器人位置按照式(4)更新。 θ(t + 1) = θ(t) + 2π Sn × (St+1 - St) (4) 5)判断结束条件。 如果机器人当前趋化步数 已经达到了最大预设步数 Nmax ,则机器人停止;否 则趋化步数 N = N + 1,转到步骤 2)。 图 4 给出了该方法的实现流程图。 图 4 基于细菌趋化行为的机器人路径规划方法 Fig.4 The flowchart of robot path planning based on bacterial chemotaxis behavior 3 仿真结果与分析 利用 MATLAB7.1 软件,首先进行了基于细菌趋 化行为的移动机器人路径规划实验,然后利用该方法 在相同规模和大小的环境中与文献[9]中的规划结果 进行了比较。 相关参数设置如下: R = 1 cm,Sn = 16,λ = 0.1 cm, Nmax = 1 500, ω1 = 0.999 9,ω2 = 0.000 1 。 3.1 基于细菌趋化行为的机器人路径规划 现假设实验环境是一个 30 cm × 30 cm 的二维 矩形区域,机器人的搜索范围都在 (0,30) 内,机器 人的起始位置为 (0,0) ,目标位置为 (25,25) 。 图 5 给出了基于细菌趋化行为的移动机器人路径规划 结果。 由图 5 分析可知:移动机器人从起始位置出 发,成功地避开了途中遇到的各种障碍物,并最终安 全地到达了目标位置。 在整个路径规划过程中,机 器人行走的路径比较平滑,且趋向性很好,机器人与 障碍物之间也保持了良好的安全性。 因此,这样的 规划结果展现了该方法的有效性及可行性。 3.2 路径规划比较 现假设实验环境是一个 100 cm × 100 cm 的二维 矩形区域,机器人的搜索范围都在 (0,100) 内,机器人 的起始位置为 (0,0) ,目标位置为 (100,100) 。 ·72· 智 能 系 统 学 报 第 9 卷