正在加载图片...
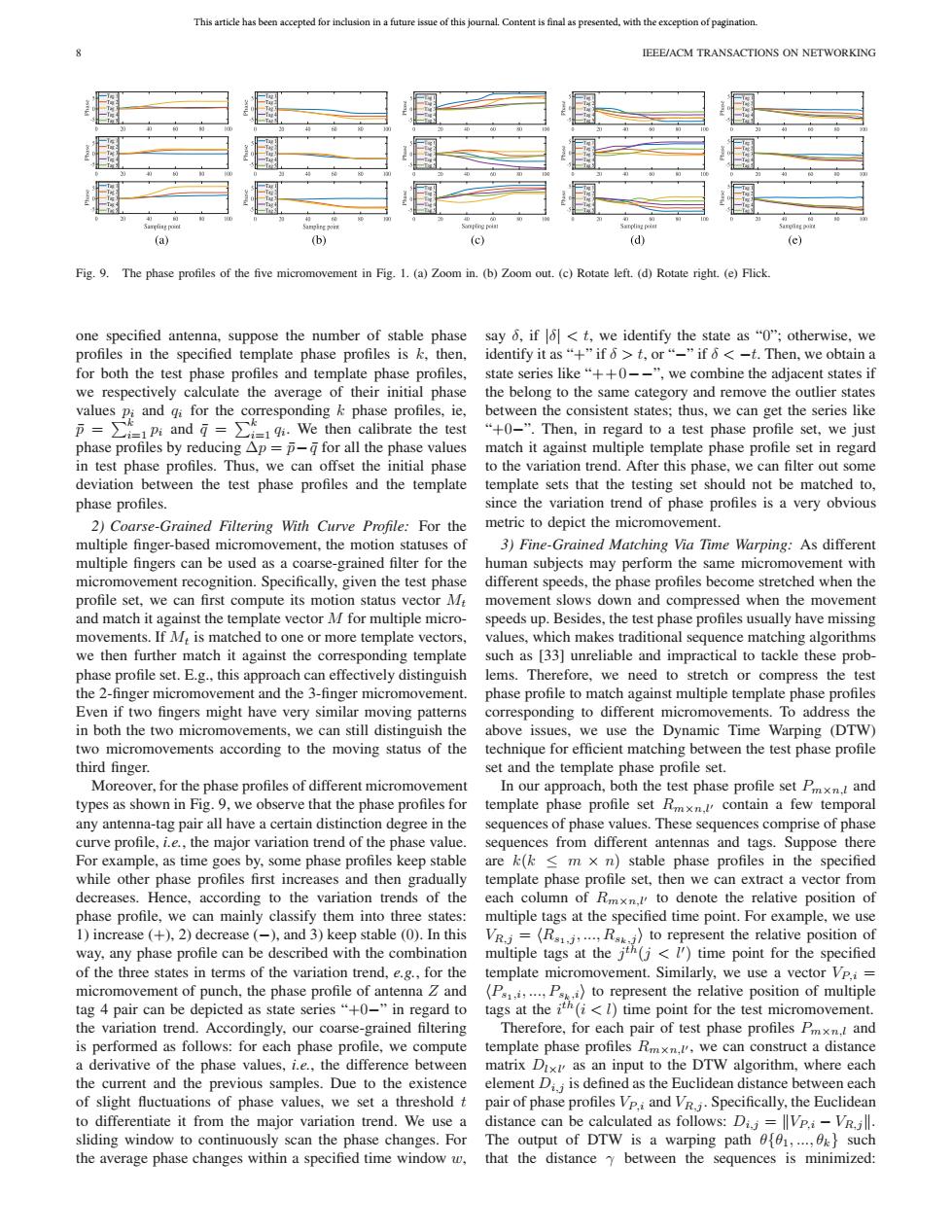
This article has been accepted for inclusion in a future issue of this journal.Content is final as presented,with the exception of pagination. IEEE/ACM TRANSACTIONS ON NETWORKING Sonpling poin Sanpling poie (a) (b) (c) (d) (e) Fig.9.The phase profiles of the five micromovement in Fig.1.(a)Zoom in.(b)Zoom out.(c)Rotate left.(d)Rotate right.(e)Flick. one specified antenna,suppose the number of stable phase say 6,if 6<t,we identify the state as "0";otherwise,we profiles in the specified template phase profiles is k,then, identify it as“+”if6>t,or“-”ifd<-t.Then,we obtain a for both the test phase profiles and template phase profiles, state series like"++0--",we combine the adjacent states if we respectively calculate the average of their initial phase the belong to the same category and remove the outlier states values p and for the corresponding phase profiles,ie. between the consistent states;thus,we can get the series like 万=∑p and=∑1g,We then calibrte the test "+0-".Then,in regard to a test phase profile set,we just phase profiles by reducing Ap =p-for all the phase values match it against multiple template phase profile set in regard in test phase profiles.Thus,we can offset the initial phase to the variation trend.After this phase,we can filter out some deviation between the test phase profiles and the template template sets that the testing set should not be matched to, phase profiles. since the variation trend of phase profiles is a very obvious 2)Coarse-Grained Filtering With Curve Profile:For the metric to depict the micromovement. multiple finger-based micromovement,the motion statuses of 3)Fine-Grained Matching Via Time Warping:As different multiple fingers can be used as a coarse-grained filter for the human subjects may perform the same micromovement with micromovement recognition.Specifically,given the test phase different speeds,the phase profiles become stretched when the profile set,we can first compute its motion status vector M movement slows down and compressed when the movement and match it against the template vector M for multiple micro- speeds up.Besides,the test phase profiles usually have missing movements.If M,is matched to one or more template vectors, values,which makes traditional sequence matching algorithms we then further match it against the corresponding template such as [33]unreliable and impractical to tackle these prob- phase profile set.E.g.,this approach can effectively distinguish lems.Therefore,we need to stretch or compress the test the 2-finger micromovement and the 3-finger micromovement. phase profile to match against multiple template phase profiles Even if two fingers might have very similar moving patterns corresponding to different micromovements.To address the in both the two micromovements,we can still distinguish the above issues,we use the Dynamic Time Warping (DTW) two micromovements according to the moving status of the technique for efficient matching between the test phase profile third finger. set and the template phase profile set. Moreover,for the phase profiles of different micromovement In our approach,both the test phase profile set Pxn.and types as shown in Fig.9,we observe that the phase profiles for template phase profile set Rmxn contain a few temporal any antenna-tag pair all have a certain distinction degree in the sequences of phase values.These sequences comprise of phase curve profile,i.e.,the major variation trend of the phase value. sequences from different antennas and tags.Suppose there For example,as time goes by,some phase profiles keep stable are k(k<m x n)stable phase profiles in the specified while other phase profiles first increases and then gradually template phase profile set,then we can extract a vector from decreases.Hence.according to the variation trends of the each column of Rmxn.t to denote the relative position of phase profile,we can mainly classify them into three states: multiple tags at the specified time point.For example,we use 1)increase (+)2)decrease (-)and 3)keep stable (0).In this VR.j=(R,R)to represent the relative position of way,any phase profile can be described with the combination multiple tags at the jth(j<1')time point for the specified of the three states in terms of the variation trend,e.g.,for the template micromovement.Similarly,we use a vector Vp.i= micromovement of punch,the phase profile of antenna 2 and (P.P)to represent the relative position of multiple tag 4 pair can be depicted as state series"+0-"in regard to tags at the ith(i<)time point for the test micromovement. the variation trend.Accordingly,our coarse-grained filtering Therefore,for each pair of test phase profiles Pmxn.t and is performed as follows:for each phase profile,we compute template phase profiles Rmxn.r,we can construct a distance a derivative of the phase values,i.e.,the difference between matrix Dixi as an input to the DTW algorithm,where each the current and the previous samples.Due to the existence element Di.;is defined as the Euclidean distance between each of slight fluctuations of phase values.we set a threshold t pair of phase profiles Vp.i and VR..Specifically,the Euclidean to differentiate it from the major variation trend.We use a distance can be calculated as follows:Dij=lVp.i-VR.jll. sliding window to continuously scan the phase changes.For The output of DTW is a warping path 0(01,...,}such the average phase changes within a specified time window w, that the distance y between the sequences is minimized:This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. 8 IEEE/ACM TRANSACTIONS ON NETWORKING Fig. 9. The phase profiles of the five micromovement in Fig. 1. (a) Zoom in. (b) Zoom out. (c) Rotate left. (d) Rotate right. (e) Flick. one specified antenna, suppose the number of stable phase profiles in the specified template phase profiles is k, then, for both the test phase profiles and template phase profiles, we respectively calculate the average of their initial phase values pi and qi for the corresponding k phase profiles, ie, p¯ = k i=1 pi and q¯ = k i=1 qi. We then calibrate the test phase profiles by reducing Δp = ¯p−q¯ for all the phase values in test phase profiles. Thus, we can offset the initial phase deviation between the test phase profiles and the template phase profiles. 2) Coarse-Grained Filtering With Curve Profile: For the multiple finger-based micromovement, the motion statuses of multiple fingers can be used as a coarse-grained filter for the micromovement recognition. Specifically, given the test phase profile set, we can first compute its motion status vector Mt and match it against the template vector M for multiple micromovements. If Mt is matched to one or more template vectors, we then further match it against the corresponding template phase profile set. E.g., this approach can effectively distinguish the 2-finger micromovement and the 3-finger micromovement. Even if two fingers might have very similar moving patterns in both the two micromovements, we can still distinguish the two micromovements according to the moving status of the third finger. Moreover, for the phase profiles of different micromovement types as shown in Fig. 9, we observe that the phase profiles for any antenna-tag pair all have a certain distinction degree in the curve profile, i.e., the major variation trend of the phase value. For example, as time goes by, some phase profiles keep stable while other phase profiles first increases and then gradually decreases. Hence, according to the variation trends of the phase profile, we can mainly classify them into three states: 1) increase (+), 2) decrease (−), and 3) keep stable (0). In this way, any phase profile can be described with the combination of the three states in terms of the variation trend, e.g., for the micromovement of punch, the phase profile of antenna Z and tag 4 pair can be depicted as state series “+0−” in regard to the variation trend. Accordingly, our coarse-grained filtering is performed as follows: for each phase profile, we compute a derivative of the phase values, i.e., the difference between the current and the previous samples. Due to the existence of slight fluctuations of phase values, we set a threshold t to differentiate it from the major variation trend. We use a sliding window to continuously scan the phase changes. For the average phase changes within a specified time window w, say δ, if |δ| < t, we identify the state as “0”; otherwise, we identify it as “+” if δ>t, or “−” if δ < −t. Then, we obtain a state series like “++0−−”, we combine the adjacent states if the belong to the same category and remove the outlier states between the consistent states; thus, we can get the series like “+0−”. Then, in regard to a test phase profile set, we just match it against multiple template phase profile set in regard to the variation trend. After this phase, we can filter out some template sets that the testing set should not be matched to, since the variation trend of phase profiles is a very obvious metric to depict the micromovement. 3) Fine-Grained Matching Via Time Warping: As different human subjects may perform the same micromovement with different speeds, the phase profiles become stretched when the movement slows down and compressed when the movement speeds up. Besides, the test phase profiles usually have missing values, which makes traditional sequence matching algorithms such as [33] unreliable and impractical to tackle these problems. Therefore, we need to stretch or compress the test phase profile to match against multiple template phase profiles corresponding to different micromovements. To address the above issues, we use the Dynamic Time Warping (DTW) technique for efficient matching between the test phase profile set and the template phase profile set. In our approach, both the test phase profile set Pm×n,l and template phase profile set Rm×n,l contain a few temporal sequences of phase values. These sequences comprise of phase sequences from different antennas and tags. Suppose there are k(k ≤ m × n) stable phase profiles in the specified template phase profile set, then we can extract a vector from each column of Rm×n,l to denote the relative position of multiple tags at the specified time point. For example, we use VR,j =
Rs1,j , ..., Rsk,j
to represent the relative position of multiple tags at the jth(j<l ) time point for the specified template micromovement. Similarly, we use a vector VP,i =
Ps1,i, ..., Psk,i
to represent the relative position of multiple tags at the i th(i<l) time point for the test micromovement. Therefore, for each pair of test phase profiles Pm×n,l and template phase profiles Rm×n,l , we can construct a distance matrix Dl×l as an input to the DTW algorithm, where each element Di,j is defined as the Euclidean distance between each pair of phase profiles VP,i and VR,j . Specifically, the Euclidean distance can be calculated as follows: Di,j = VP,i − VR,j. The output of DTW is a warping path θ{θ1, ..., θk} such that the distance γ between the sequences is minimized:�������